Motion
When you use Move APIs, you need to understand the difference between absolute, relative, and additive move. This section describes how they work.
Linear motion
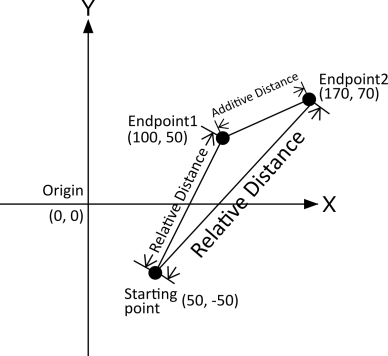
Linear motion is applied to MoveAxis and MoveLinear functions, and MC_Move function blocks. Note that XY can be any directions. They don't indicate the fixed directions. When you use the Move functions, XY are defined by the directions your axis moves to.
| Absolute, relative, and additive | |
|---|---|
|
This is an example of absolute, relative and additive linear motion. There is a starting point (50, -50) and two end points: Endpoint 1 (100, 50) and Endpoint 2 (170, 70). If your axes need to travel to either or both of them, you can use absolute, relative, and additive functions to complete your task.
|
|
Circular motion
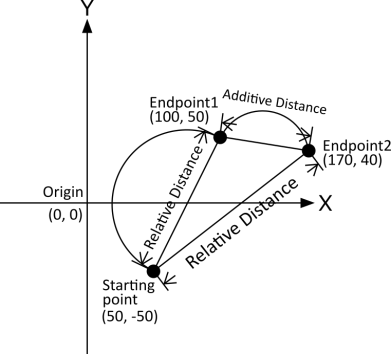
Circular motion is applied to MoveCircular functions and MC_MoveCircular function blocks. Note that XY can be any directions. They don't indicate the fixed directions. When you use MoveCircular functions, XY are defined by the directions your axes move to.
| Absolute, relative, and additive | |
|---|---|
|
This is an example of absolute, relative, and additive circular motion. There is a starting point (50, -50) and two end points: Endpoint 1 (100, 50) and Endpoint 2 (170, 40). If your axes need to travel to either or both of them, you can use absolute, relative, and additive functions to complete your task.
|
|
Commanded and set position
The difference between a commanded and set position is that a commanded position is the target position of a command, and a set position is an interpolated position when an axis is heading to a command's target.See also
RT and Win32 – KINGSTAR Motion - Axis PTP motion
RT and Win32 – KINGSTAR Motion - Group motion
.NET API – Motion Class - Axis PTP motion
.NET API – Motion Class - Group motion
.NET Class – IAxis Interface - Methods
.NET Class – IGroup Interface - Methods
PLC function blocks – Single axis – Single axis movement
PLC function blocks – Multiple axes – Axis group movement