Delta
Delta is an industrial robot that consists of three parallelogram-shaped arms connected with a base. The design of installing heavy motors in the top frame allows the robot's arms to be slender and lightweight, which enables delta robots to perform super-fast and high-precision motion. They are commonly used for pick-and-place, sorting, and packaging operations.
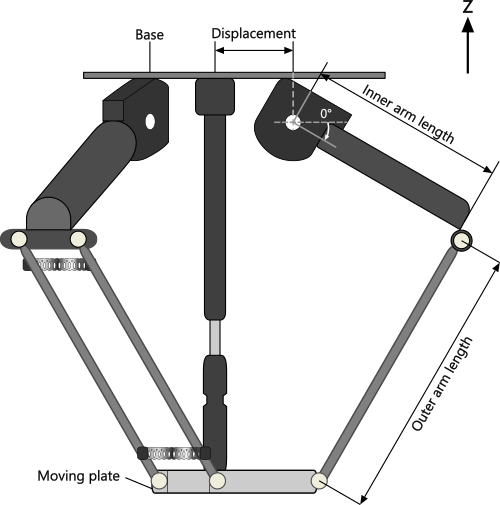
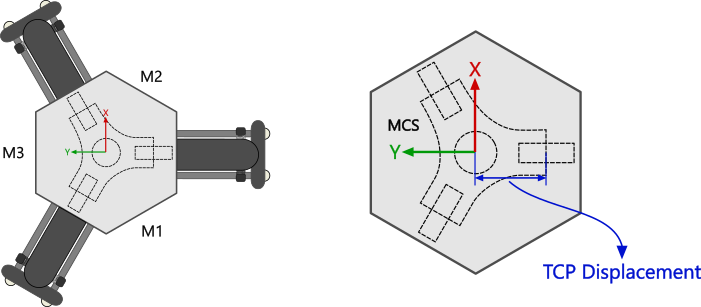
The following figure shows the structure of a delta robot. It uses machine coordinate system (MCS).
Parameters
All axes' units are in degrees; 0° is defined as shown in the diagram. The arrows indicate the positive direction. This applies to all three motors.
The origin of MCS is in the center of the base. The Y-axis is determined by joint 1 (first axis in the group) and this joint is in the negative direction of the Y-axis.
| Parameters | Description | Unit |
|---|---|---|
| Inner arm length | The distance between the pivot points of the inner arm. This is the arm directly linked with the motor. | mm |
| Outer arm length | The distance between the pivot points of the outer arm. | mm |
| Displacement | The distance between the center of the base and the top pivot point of the inner arm. | mm |
| TCP Displacement | The distance between the center of the moving plate and the bottom pivot point of the outer arm. | mm |
See also
RT and Win32 – KINGSTAR Motion - Type
.NET Enumeration
PLC Type