SCARA
SCARA stands for Selective Compliance Assembly Robot Arm or Selective Compliance Articulated Robot Arm. It is an industrial robot that is compliant on the XY plane and mostly rigid in the Z direction (some arms can move in the Z direction). SCARA is high-speed and commonly used for pick-and-place or assembly operations.
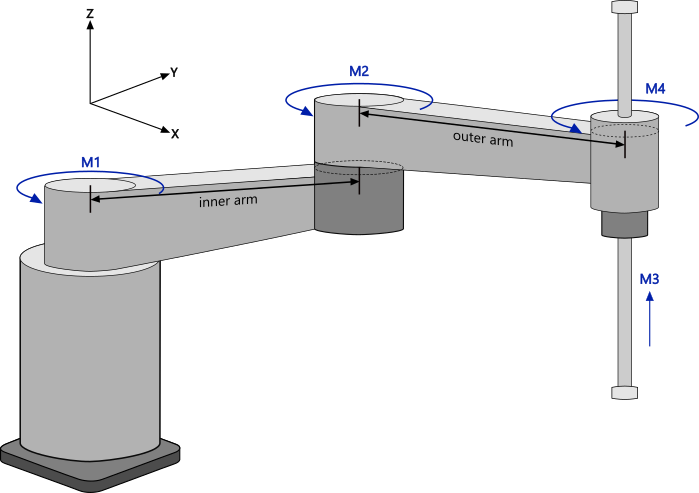
The following figure shows the structure of SCARA. It uses machine coordinate system (MCS).
Parameters
The default origin of MCS is located at M1 and the X-axis is determined by SCARA when M1 and M2's motors are both at zero position.
| Parameters | Description | Unit |
|---|---|---|
| Inner arm length | The distance between M1 and M2. This is the arm near the origin. | mm |
| Outer arm length |
The distance between M2 and M4. This is the arm near the tool center point (TCP). |
mm |
| Gear coupling | The coupling factor between the axes M3 and M4. It is the ratio of the moved distance of M3 to the rotated angle of M4. If the height of the arm is changed when M4 rotates, gear coupling will be used to offset the change of the height. Pass zero if M3 and M4 are decoupled. | mm per degree |
See also
RT and Win32 – KINGSTAR Motion - Type
.NET Enumeration
PLC Type