回馈延迟
回馈延迟指的是 「KINGSTAR 传送指令」与「从伺服驱动器接收到结果」两者间的时间差。将延迟添加到 PID 计算可防止新命令生成错误值。可消除马达反应中的振荡。回馈延迟通常只有在使用适当的前馈增益时才有用,而周期将依不同伺服驱动器有所不同。
延迟为何发生?
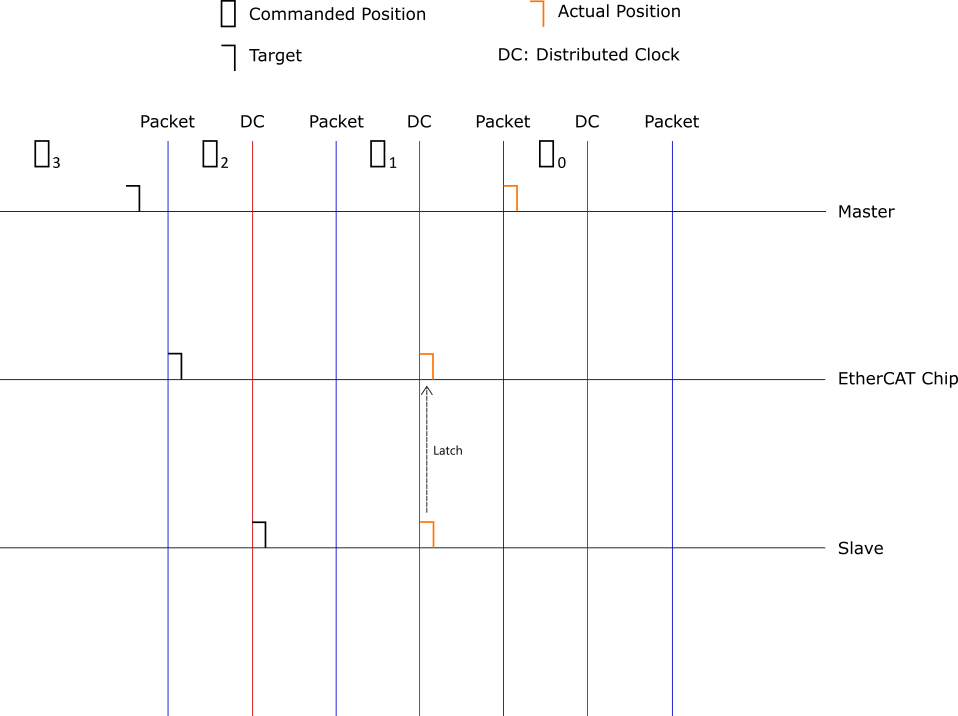
KINGSTAR (主装置)传送指令位置给伺服驱动器(从属装置),此位置由插补计算出,接著,PID 使用此指令位置来计算目标,此目标可以是位置、速度或扭矩,而该目标被写入封包中并发送至 EtherCAT 晶片(通常是 ET1200),从属应用程式接收到 Sync0 讯号后,将目标发送到驱动器,驱动器使用其逻辑计算并将目标转换为电流,在轴移动后,驱动器记录其实际位置并在下一个 Sync0 讯号将其发送回 EtherCAT 晶片。此实际位置将在下一个封包中由 EtherCAT 晶片传送到 KINGSTAR。而 KINGSTAR 在每一周期皆会传送一个指令位置,KINGSTAR 从发出位置命令到接收实际位置时,已过了几个周期,因此产生了延迟。
KINGSTAR 如何处理延迟问题?
KINGSTAR 需要知道应回溯多少个周期,以便将实际位置与之前发送的命令位置进行比较,若延迟为 0 个周期,则将实际位置与当前指令位置进行比较; 如果延迟为1个周期,则将实际位置与1个周期前发送的指令位置进行比较,以此类推。通常 KINGSTAR 需回溯 3 个周期,但若驱动器没有正确遵循同步,周期数可能会有所不同。