McCircMode
当您使用 PLCopen MoveCircular API 时,需先理解轴如何在不同的圆弧模式下运作,下表展示如何定义圆弧运动:
| mcBorder | |
|---|---|
|
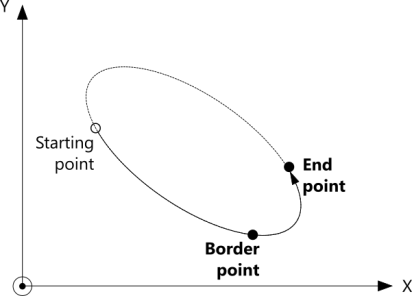
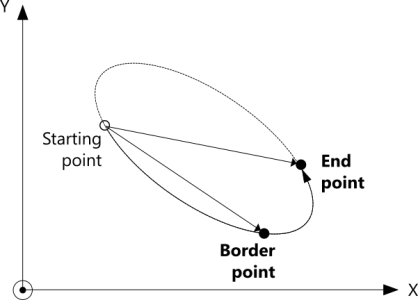
使用者在机器将行进的圆弧上定义终点和边界点(= 输入“AuxPoint”)。 优点: + 机器通常可以到达边界点,也就是说,机器是可以被教导的:您手动记录目标位置,在命令中使用这些位置,则机器将按照您手动移动它的路径移动。 缺点: -在单一命令中角度限制 < 2π。 |
MoveCircularAbsolute |
|
|
|
| MoveCircularRelative | |
|
|
|
| mcCenter | |
|---|---|
|
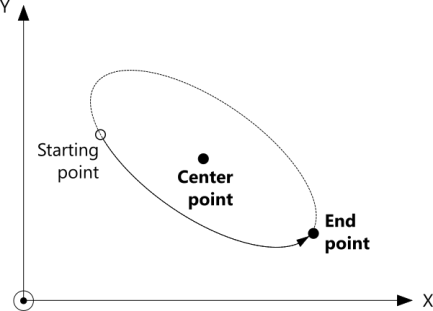
2D 使用者在圆弧上定义终点和中心点(=输入“AuxPoint”)。 使用此模式时,输入之 McCircPathChoice 决定机器将走短或长路径。
3D 在 3 轴系统(3D 空间)中,可从两侧查看圆形平面,但很难知道平面是面向哪一方向的。在 KINGSTAR 中,有两规则可以识别方向:
当圆平面面向的方向清楚后,使用 McCircPathChoice 决定机器将走短或长路径。 缺点: -在单一命令中角度限制 < 2π 及 ≠ π。 -圆的方程式多重决定 (Overdetermination) 。 -由于与障碍物碰撞,通常无法教导中心点。 |
MoveCircularAbsolute |
|
|
|
| MoveCircularRelative | |
|
|
|
| mcRadius | |
|---|---|
|
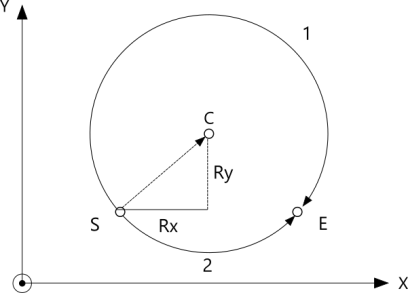
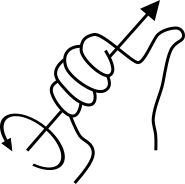
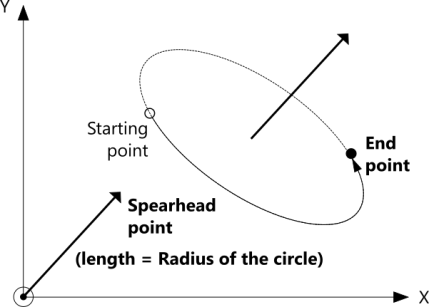
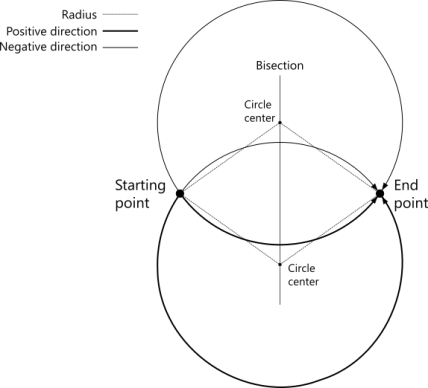
3D mcRadius 仅能在三轴系统中使用。使用者根据右手定则(参见下图)定义圆面的端点和垂直向量,该向量的长度对应于圆的半径。向量的矛头点是绝对坐标中的输入信号 "AuxPoint",也就是说,坐标系统中指定的原点为"CoordSystem"。 在定义了半径和端点之后,我们在 3D 空间中得到一个圆平面,该平面面对的方向将由 z 轴决定,而平面面向的方向为 z 轴为正的方向。 接著需决定路径。在起点和终点之间,半径形成两个圆,为机器提供了四条行进路径:短逆时针方向、长逆时针方向、短顺时针方向、长顺时针方向。 由于运动采用右手定则,方向将始终为正(逆时针),因此剩下了两个选项:正方向的短路径或长路径。 我们可使用 McCircPathChoice 来决定路径,若想要短路径,选择 mcShortPath;反之则选 mcLongPath。
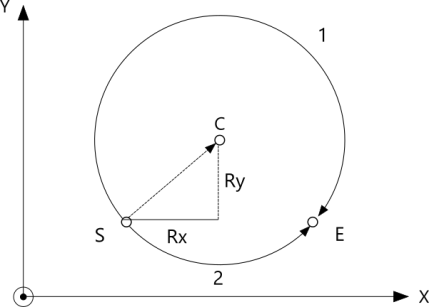
2D 若您使用的是 2 轴系统但欲使用 mcRadius,则需要您自己定义 z 轴点。在 2D 空间中,mcRadius 会自动添加第三维空间,使空间变为 3D。例如,若您的起点是 {3, 5},它将会变更为 {3, 5, 0},终点会变为像 {4, 9, 0},请注意 z 轴将始终为零。 在 2D 中的 AuxPoint 必须为 {0, 0, X},X 为正或负值,也就是向量的长度,等同于圆半径的长度。定义完 AuxPoint 后,使用 McCircPathChoice 来选择长路径或短路径,短路径选择 mcShortPath 而长路径选择 mcLongPath。 缺点: -在单一命令中角度限制 < 2π。 -必须计算垂直向量。 -过度决定圆的方程式。 范例: AuxPoint = (50,0,0) → 根据右手定则在 yz 平面平行的平面上画一个半径为 50,旋转轴平行于 x 轴的圆(CoordSystem = ACS)。 |
MoveCircularAbsolute |
|
|
|
|
|
|
| MoveCircularRelative | |
|
|
|
参见
RT 与 Win32 API-KINGSTAR 运动 - 轴组运动
.NET API-运动类别 - 轴组运动
.NET Class – IGroup 介面 - 方法
PLC 功能块-多轴-轴组运动