SCARA
SCARA 为选择顺应性装配机械手臂 (Selective Compliance Assembly Robot Arm) 或选择顺应性关节机械手臂 (Selective Compliance Articulated Robot Arm) 的简称。它是一种工业用机械手臂,可进行 XY 方向的移动,在 Z 方向上大多是固定的(一些手臂可以在 Z 方向上移动)。SCARA 在运动上相当快速,常用于拾放或组装作业。
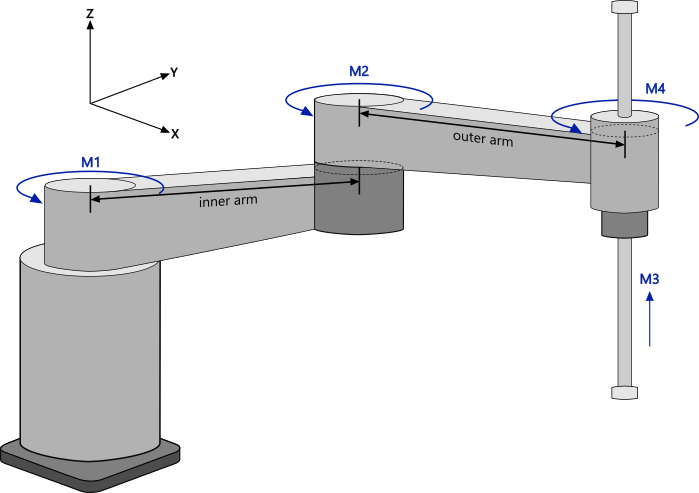
下图展示了 SCARA 的结构,它使用的是机床坐标系统 (MCS)。
参数
MCS 的默认原点为 M1。X 轴的取决是当 M1 和 M2 的马达都处于零的位置时,由 SCARA 决定。
| 参数 | 说明 | 单位 |
|---|---|---|
| 内臂长度 | M1 及 M2 之间的距离。内臂接近原点。 | mm |
| 外臂长度 |
M2 及 M4 之间的距离。外臂接近工具中心点(TCP)。 |
mm |
| 齿轮联轴器 |
M3 及 M4 两轴间的耦合因子。它是 M3 移动距离与 M4 旋转角度的比值。若 M4 转动时手臂的高度发生变化,则需使用齿轮联轴器来抵消高度的变化。若 M3 和 M4 解耦,则传递零。 |
mm 每度 |
参见
RT 与 Win32 – KINGSTAR 运动 - 类型
.NET 列举
PLC 类型