| 功能块 | MC_SetCartesianTransform | ||
|---|---|---|---|
| 设置 MCS 和 PCS 之间的笛卡尔转换。 | |||
| VAR_IN_OUT | |||
| B | GroupIn | AXES_GROUP_REF | 轴组的参考,参考以零为起点,最多可有 32 个轴组。 |
| VAR_INPUT | |||
| B | Execute | BOOL | 在上升边缘设置笛卡尔转换。 |
| B | TransX | LREAL | 平移向量的 X 轴分量。 |
| B | TransY | LREAL | 平移向量的 Y 轴分量。 |
| B | TransZ | LREAL | 平移向量的 Z 轴分量。 |
| B | RotAngle1 | LREAL | Z 轴旋转角度分量(单位:度)。 |
| B | RotAngle2 | LREAL | Y 轴旋转角度分量(单位:度)。 |
| B | RotAngle3 | LREAL | X 轴旋转角度分量(单位:度)。 |
| E | ExecutionMode | MC_ExecutionMode | 说明命令何时执行及新转换生效的时间。 |
| VAR_OUTPUT | |||
| B | Done | BOOL | 转换设定成功。 |
| E | Busy | BOOL | 功能块未结束。 |
| B | Error | BOOL | 功能块中出现错误的讯号。 |
| E | ErrorID | MC_Error | 错误识别。 |
|
|||
| MC_SetCartesianTransform | ||||||
|---|---|---|---|---|---|---|
| AXES_GROUP_REF | GroupIn | Group | AXES_GROUP_REF | |||
| BOOL | Execute | Done | BOOL | |||
| LREAL | TransX | Busy | BOOL | |||
| LREAL | TransY | Error | BOOL | |||
| LREAL | TransZ | ErrorID | MC_Error | |||
| LREAL | RotAngle1 | |||||
| LREAL | RotAngle2 | |||||
| LREAL | RotAngle3 | |||||
| MC_ExecutionMode | ExecutionMode | |||||
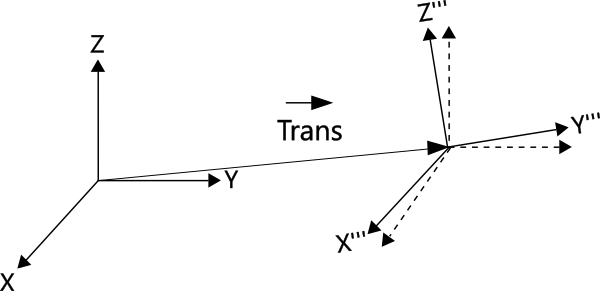
平移的定义:
![]()
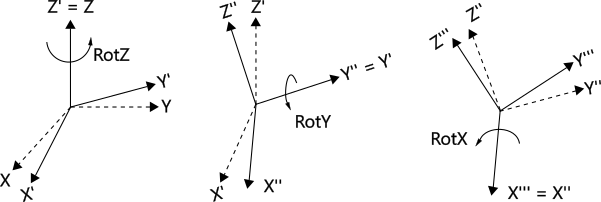
旋转定义之范例:
旋转是透过绕著每个以 Z 方向开始的座标方向进行后续旋转来定义的。
旋转的定义:
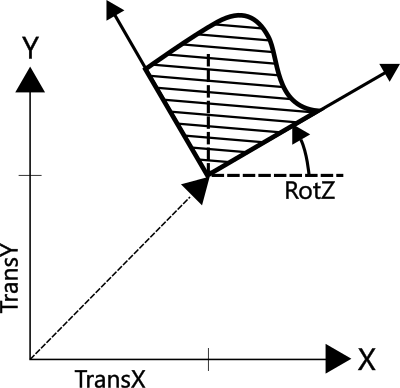
范例:平面内的旋转(二维)
SetCartesianTransform 使用 { 50, 50, 0, 0, 0, 30 }: