| 功能块 | MC_GroupInch | ||
|---|---|---|---|
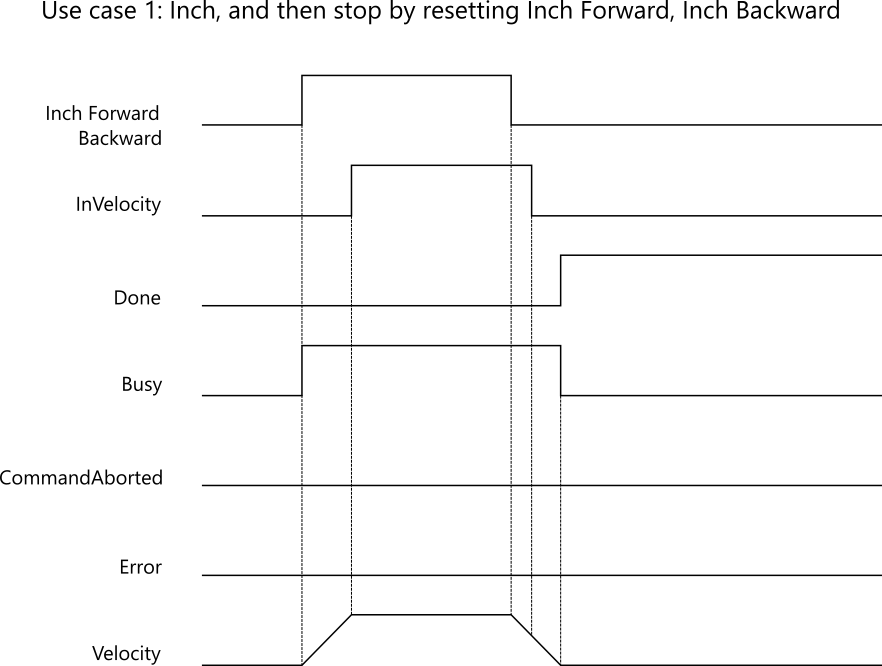
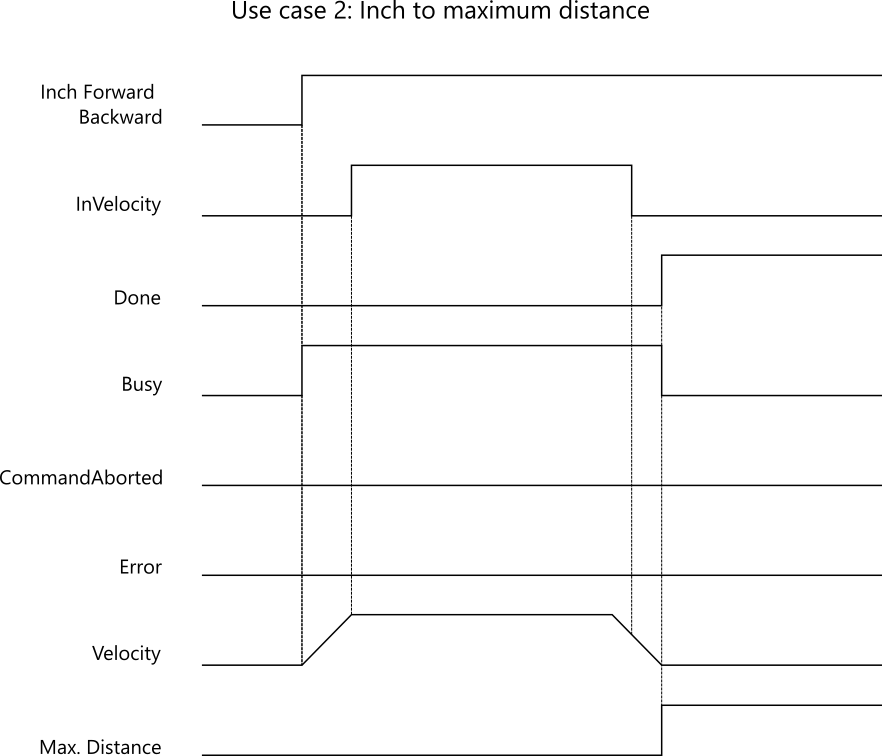
| 命令轴组的永不停止的控制运动在有最大距离限制下以指定速度移动。当轴到达最大距离时将会自动停止。 | |||
| VAR_IN_OUT | |||
| V | GroupIn | AXES_GROUP_REF | 轴组的参考,参考以零为起点,最多可有 32 个轴组。 |
| VAR_INPUT | |||
| V | InchForward | BOOL | 移动至正方向。轴组开始移动时,变更为 TRUE;当停止时则变为 FALSE。 |
| V | InchBackward | BOOL | 移动至负方向。轴组开始移动时,变更为 TRUE;当停止时则变为 FALSE。 |
| V | Distance | ARRAY [0..63] OF LREAL | 此运动移动的最大距离。 |
| V | Velocity | ARRAY [0..63] OF LREAL | 指定速度的值,[单位/每秒]。 |
| V | Acceleration | LREAL | 加速度值,单位由 MC_ProfileType 决定(马达的增加能量) [单位/每秒2] 或 [每秒]。 |
| V | Deceleration | LREAL | 减速度值,单位由 MC_ProfileType 决定(马达的减少能量) [单位/每秒2] 或 [每秒]。 |
| V | Jerk | LREAL | 加加速度值。单位由 MC_ProfileType 决定为 [单位/每秒3] 或 [每秒]。 |
| V | CoordSystem | MC_CoordSystem | 座标系统。 |
| VAR_OUTPUT | |||
| V | InVelocity | BOOL | 每一轴的命令速度已到达。 |
| V | Done | BOOL | 功能块已停止。 |
| V | Busy | BOOL | 功能块尚未结束且预期将有新的输出值。 |
| V | CommandAborted | BOOL | 命令被另一个命令中止。 |
| V | Error | BOOL | 功能块中出现错误的讯号。 |
| V | ErrorID | MC_Error | 错误识别。 |
重要:若距离很短且速度很快,则轴的“煞停距离”可能会超过指定的距离,这可能会导致轴故障。 |
|||
| MC_GroupInch | ||||||
|---|---|---|---|---|---|---|
| AXES_GROUP_REF | GroupIn | Group | AXES_GROUP_REF | |||
| BOOL | InchForward | InVelocity | BOOL | |||
| BOOL | InchBackward | Done | BOOL | |||
| ARRAY [0..63] OF LREAL | Distance | Busy | BOOL | |||
| ARRAY [0..63] OF LREAL | Velocity | CommandAborted | BOOL | |||
| LREAL | Acceleration | Error | BOOL | |||
| LREAL | Deceleration | ErrorID | MC_Error | |||
| LREAL | Jerk | |||||
| MC_CoordSystem | CoordSystem | |||||