KINGSTAR
KINGSTAR 由许多元件所组成,以下将一一介绍。
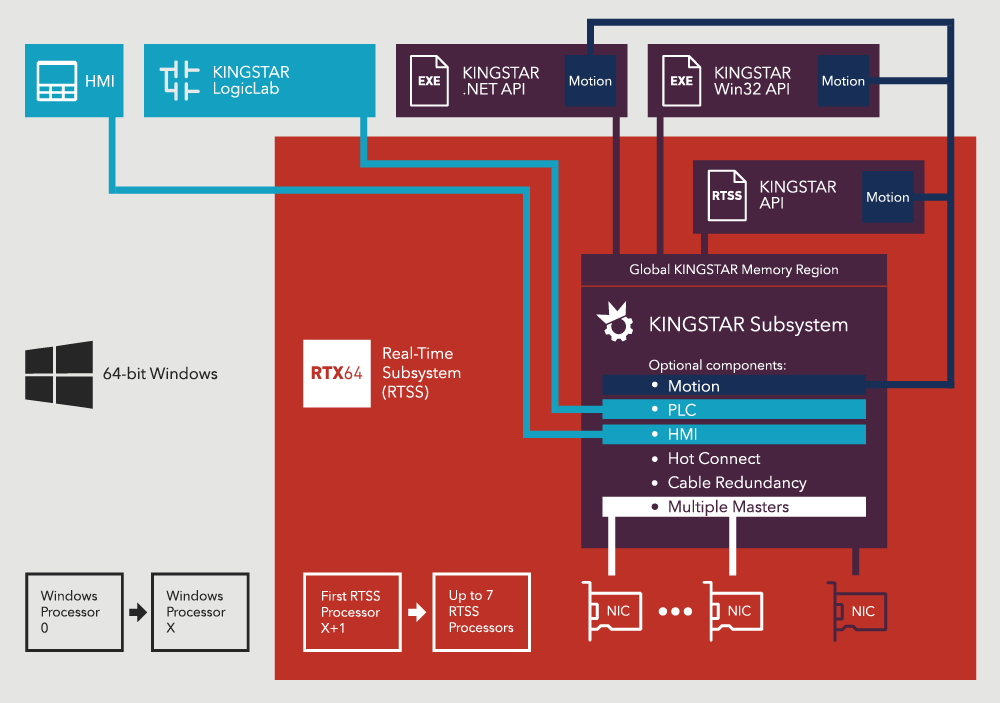
KINGSTAR 子系统
KINGSTAR 子系统包含几个元件:
总线
总线为 KINGSTAR 子系统的基本元件,是一通信和配置函式库,封装了 KINGSTAR 的所有 EtherCAT 功能。总线直接连接并控制用于所有 EtherCAT 网路活动的网路介面卡,负责传送和接收网路介面卡上的封包。总线启动时会扫描其 EtherCAT 网路,查找网路上可用的硬体并自动配置设备,总线一启动,硬体即可使用。
EtherCAT 即时数据被储存在循环封包内,使用总线 API 函式即可取得包含即时数据封包内的变数。总线将 EtherCAT 的复杂性隐藏,并以 CANopen 介面代替 EtherCAT (CoE) 驱动器呈现。有了总线,无需知道变数在哪里、供应商硬体之间的差异或如何处理同步问题,这些将全部交由总线处理。
运动 (Motion)
运动的功能如同运动控制卡,其差别在于它是软体,能与多样的硬体一起协作,亦可使用普遍的程式语言来开发运动应用程式。Motion 用来控制轴的介面系遵循 PLCopen 运动控制标准所设计的。
Motion 架构可让多个应用程式连接相同的 EtherCAT 运行,其中一些是Windows 程式,一些是即时 (real-time) 程式,也就是说可以同时在一台装置上控制多个不同的工作站台。可将装置分成多个站,并使用各个应用程式来控制各自的站台,在单一电脑的应用程式都运行于相同的 Motion 和 EtherCAT 总线之上,如此一来可根据需要,为机器的每个部分使用不同的程式语言,在不同的环境中开发应用程式,而工程师可在不担心干扰的情况下编写他们的程式。
注意:若多个 KINGSTAR 应用程式同时运行,请在关闭最后一个应用程式后停用 KINGSTAR 子系统,若有应用程式在连接 KINGSTAR 子系统的情况下关闭该子系统,则可能会导致电脑故障。
介面
KINGSTAR 提供了数种应用程式开发介面:
- RT
- Win 32 (Windows API)
- .NET
- PLC
以上皆可存取 KINGSTAR 函式库。由这些介面创建的所有应用程式皆可使用 KINGSTAR 全域记忆体同步化。RT 和 Win 32 使用 C/C++、.NET 使用 C# 和 VB,而 PLC 则使用 IEC 61131-3 定义的程式语言;而 PLC,KINGSTAR 函式块可透过 KINGSTAR LogicLab 取得。
热插拔
EtherCAT 热插拔功能可让 EtherCAT 在网路已经在运行的情况下添加硬体,由于 KINGSTAR 使用自动配置,它会检测添加的硬体并自动对其进行配置,一旦新硬体配置完成,就可供应用程式使用。
多主站
多主装置功能允许您创建多个 KINGSTAR 实例并使用它们同时控制不同的网卡。可以使用 Create 函式中的参数启用此功能。
KINGSTAR 全域记忆体
因为 KINGSTAR 能让不同程式语言撰写的多个应用程式连到子系统,所以您需要一种简单的方式让这些应用程式彼此沟通,解决之道就是 KINGSTAR 全域记忆体,该记忆体由 KINGSTAR 子系统控制。您可以在全域记忆体中读写任何变数,无需知道变数位置,所有介面,无论是 PLC、C/C++、Win32 和 Windows .NET,都有 API 可以存取 KINGSTAR 全域记忆体。如此,您可以让多个应用程式共用变数,即使它们是在 Windows 或 RTX64 上,抑或是用不同程式语言撰写而成。
运动插补与 PID
机器或机器人控制器都需要运动插补和 PID 控制马达。有了 Motion,您可以决定每一轴是要使用应用程式、KINGSTAR 子系统、还是伺服驱动器来控制,若不想要在应用程式中使用运动插补和 PID,KINGSTAR 子系统可以提供相同的配置选项让您设定所有的马达,无论马达的类型(线性、伺服或步进)或厂牌为何。
例如:您需要建置机器人,这表示您需要机器人控制器。这个控制器可以是在 Motion 下使用 C/C++ 开发的即时应用程式,能够自行运算插补控制六轴,加上一或两张 I/O 介面卡。旁边有 PLC,可以让终端使用者或系统整合商在系统中增加更多硬体、I/O 或马达,然后透过 PLC 控制它们,以及用 Windows 或其他机器上的应用程式同步化这些装置。
注意:运动插补和 PID 通常是即时功能(每个周期执行),所以它们应该要在即时应用程式上执行,而非在 Windows 上执行。