回饋延遲
回饋延遲指的是 「KINGSTAR 傳送指令」與「從伺服驅動器接收到結果」兩者間的時間差。將延遲添加到 PID 計算可防止新命令生成錯誤值。可消除馬達反應中的振盪。回饋延遲通常只有在使用適當的前饋增益時才有用,而週期將依不同伺服驅動器有所不同。
延遲為何發生?
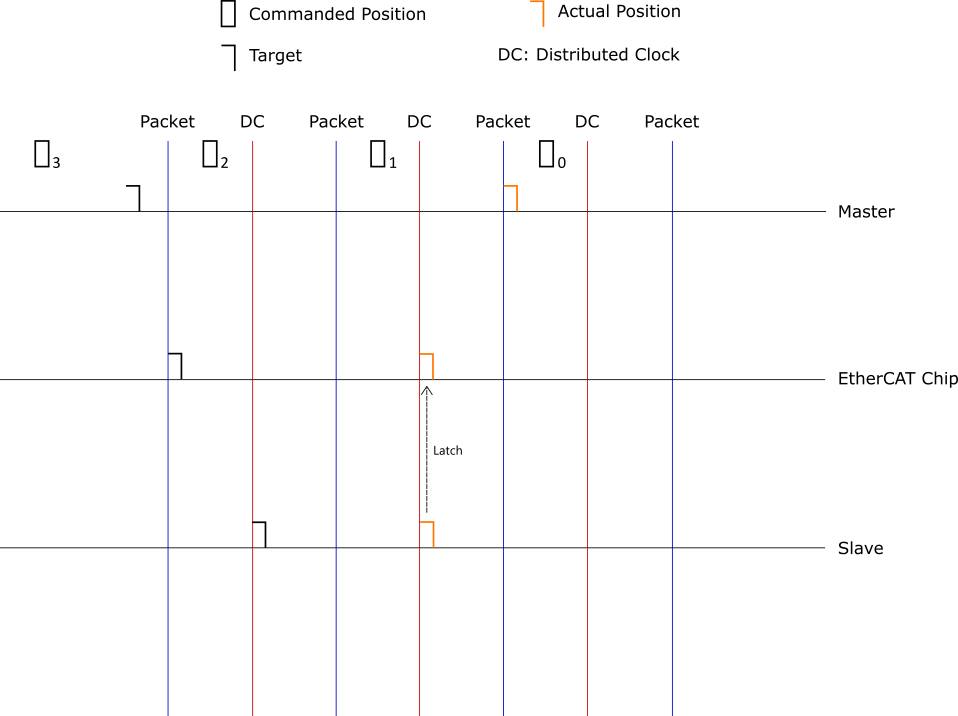
KINGSTAR (主裝置)傳送指令位置給伺服驅動器(從屬裝置),此位置由插補計算出,接著,PID 使用此指令位置來計算目標,此目標可以是位置、速度或扭矩,而該目標被寫入封包中並發送至 EtherCAT 晶片(通常是 ET1200),從屬應用程式接收到 Sync0 訊號後,將目標發送到驅動器,驅動器使用其邏輯計算並將目標轉換為電流,在軸移動後,驅動器記錄其實際位置並在下一個 Sync0 訊號將其發送回 EtherCAT 晶片。此實際位置將在下一個封包中由 EtherCAT 晶片傳送到 KINGSTAR。而 KINGSTAR 在每一周期皆會傳送一個指令位置,KINGSTAR 從發出位置命令到接收實際位置時,已過了幾個週期,因此產生了延遲。
KINGSTAR 如何處理延遲問題?
KINGSTAR 需要知道應回溯多少個週期,以便將實際位置與之前發送的命令位置進行比較,若延遲為 0 個週期,則將實際位置與當前指令位置進行比較; 如果延遲為1個週期,則將實際位置與1個週期前發送的指令位置進行比較,以此類推。通常 KINGSTAR 需回溯 3 個週期,但若驅動器沒有正確遵循同步,週期數可能會有所不同。