McCircMode
當您使用 PLCopen MoveCircular API 時,需先理解軸如何在不同的圓弧模式下運作,下表展示如何定義圓弧運動:
| mcBorder | |
|---|---|
|
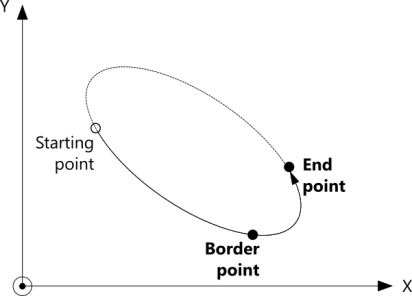
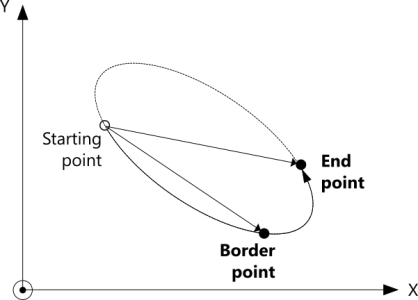
使用者在機器將行進的圓弧上定義終點和邊界點(= 輸入“AuxPoint”)。 優點: + 機器通常可以到達邊界點,也就是說,機器是可以被教導的:您手動記錄目標位置,在命令中使用這些位置,則機器將按照您手動移動它的路徑移動。 缺點: -在單一命令中角度限制 < 2π。 |
MoveCircularAbsolute |
|
|
|
| MoveCircularRelative | |
|
|
|
| mcCenter | |
|---|---|
|
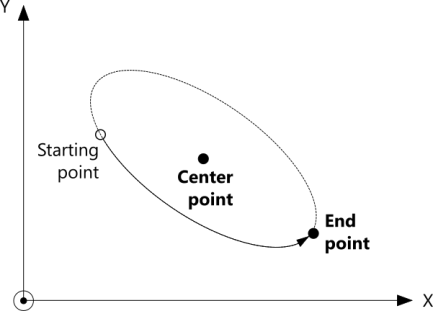
2D 使用者在圓弧上定義終點和中心點(=輸入“AuxPoint”)。 使用此模式時,輸入之 McCircPathChoice 決定機器將走短或長路徑。
3D 在 3 軸系統(3D 空間)中,可從兩側查看圓形平面,但很難知道平面是面向哪一方向的。在 KINGSTAR 中,有兩規則可以識別方向:
當圓平面面向的方向清楚後,使用 McCircPathChoice 決定機器將走短或長路徑。 缺點: -在單一命令中角度限制 < 2π 及 ≠ π。 -圓的方程式多重決定 (Overdetermination) 。 -由於與障礙物碰撞,通常無法教導中心點。 |
MoveCircularAbsolute |
|
|
|
| MoveCircularRelative | |
|
|
|
| mcRadius | |
|---|---|
|
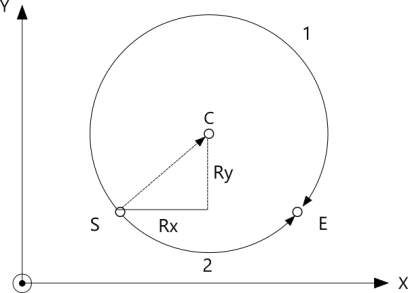
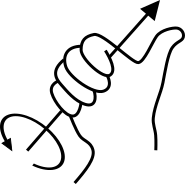
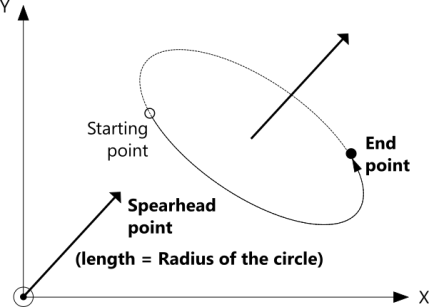
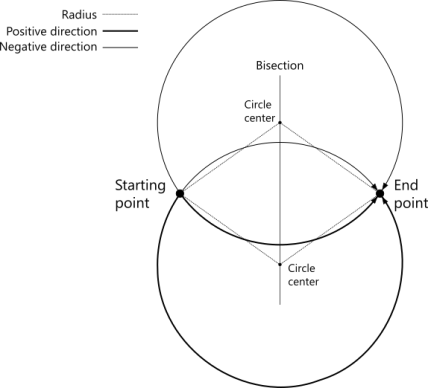
3D mcRadius 僅能在三軸系統中使用。使用者根據右手定則(參見下圖)定義圓面的端點和垂直向量,該向量的長度對應於圓的半徑。向量的矛頭點是絕對坐標中的輸入信號 "AuxPoint",也就是說,坐標系統中指定的原點為"CoordSystem"。 在定義了半徑和端點之後,我們在 3D 空間中得到一個圓平面,該平面面對的方向將由 z 軸決定,而平面面向的方向為 z 軸為正的方向。 接著需決定路徑。在起點和終點之間,半徑形成兩個圓,為機器提供了四條行進路徑:短逆時針方向、長逆時針方向、短順時針方向、長順時針方向。 由於運動採用右手定則,方向將始終為正(逆時針),因此剩下了兩個選項:正方向的短路徑或長路徑。 我們可使用 McCircPathChoice 來決定路徑,若想要短路徑,選擇 mcShortPath;反之則選 mcLongPath。
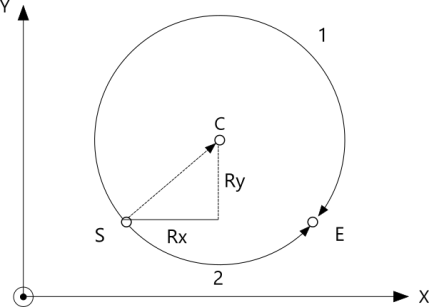
2D 若您使用的是 2 軸系統但欲使用 mcRadius,則需要您自己定義 z 軸點。在 2D 空間中,mcRadius 會自動添加第三維空間,使空間變為 3D。例如,若您的起點是 {3, 5},它將會變更為 {3, 5, 0},終點會變為像 {4, 9, 0},請注意 z 軸將始終為零。 在 2D 中的 AuxPoint 必須為 {0, 0, X},X 為正或負值,也就是向量的長度,等同於圓半徑的長度。定義完 AuxPoint 後,使用 McCircPathChoice 來選擇長路徑或短路徑,短路徑選擇 mcShortPath 而長路徑選擇 mcLongPath。 缺點: -在單一命令中角度限制 < 2π。 -必須計算垂直向量。 -過度決定圓的方程式。 範例: AuxPoint = (50,0,0) → 根據右手定則在 yz 平面平行的平面上畫一個半徑為 50,旋轉軸平行於 x 軸的圓(CoordSystem = ACS)。 |
MoveCircularAbsolute |
|
|
|
|
|
|
| MoveCircularRelative | |
|
|
|
參見
RT 與 Win32 API-KINGSTAR 運動 - 軸組運動
.NET API-運動類別 - 軸組運動
.NET Class – IGroup 介面 - 方法
PLC 功能塊-多軸-軸組運動