| 功能塊 | MC_GroupInch | ||
|---|---|---|---|
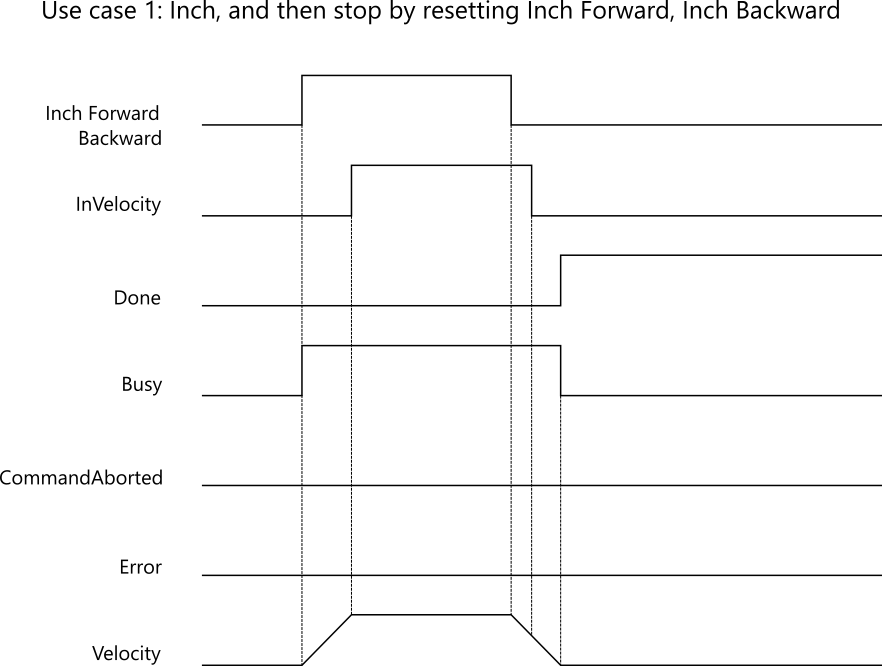
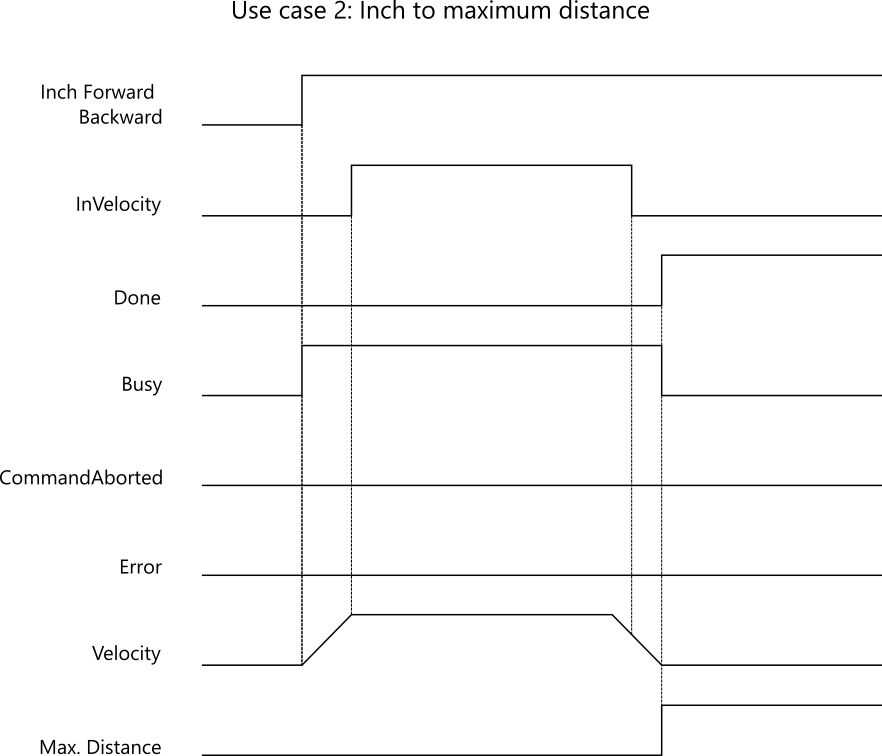
| 命令軸組的永不停止的控制運動在有最大距離限制下以指定速度移動。當軸到達最大距離時將會自動停止。 | |||
| VAR_IN_OUT | |||
| V | GroupIn | AXES_GROUP_REF | 軸組的參考,參考以零為起點,最多可有 32 個軸組。 |
| VAR_INPUT | |||
| V | InchForward | BOOL | 移動至正方向。軸組開始移動時,變更為 TRUE;當停止時則變為 FALSE。 |
| V | InchBackward | BOOL | 移動至負方向。軸組開始移動時,變更為 TRUE;當停止時則變為 FALSE。 |
| V | Distance | ARRAY [0..63] OF LREAL | 此運動移動的最大距離。 |
| V | Velocity | ARRAY [0..63] OF LREAL | 指定速度的值,[單位/每秒]。 |
| V | Acceleration | LREAL | 加速度值,單位由 MC_ProfileType 決定(馬達的增加能量) [單位/每秒2] 或 [每秒]。 |
| V | Deceleration | LREAL | 減速度值,單位由 MC_ProfileType 決定(馬達的減少能量) [單位/每秒2] 或 [每秒]。 |
| V | Jerk | LREAL | 加加速度值。單位由 MC_ProfileType 決定為 [單位/每秒3] 或 [每秒]。 |
| V | CoordSystem | MC_CoordSystem | 座標系統。 |
| VAR_OUTPUT | |||
| V | InVelocity | BOOL | 每一軸的命令速度已到達。 |
| V | Done | BOOL | 功能塊已停止。 |
| V | Busy | BOOL | 功能塊尚未結束且預期將有新的輸出值。 |
| V | CommandAborted | BOOL | 命令被另一個命令中止。 |
| V | Error | BOOL | 功能塊中出現錯誤的訊號。 |
| V | ErrorID | MC_Error | 錯誤識別。 |
重要:若距離很短且速度很快,則軸的“煞停距離”可能會超過指定的距離,這可能會導致軸故障。 |
|||
| MC_GroupInch | ||||||
|---|---|---|---|---|---|---|
| AXES_GROUP_REF | GroupIn | Group | AXES_GROUP_REF | |||
| BOOL | InchForward | InVelocity | BOOL | |||
| BOOL | InchBackward | Done | BOOL | |||
| ARRAY [0..63] OF LREAL | Distance | Busy | BOOL | |||
| ARRAY [0..63] OF LREAL | Velocity | CommandAborted | BOOL | |||
| LREAL | Acceleration | Error | BOOL | |||
| LREAL | Deceleration | ErrorID | MC_Error | |||
| LREAL | Jerk | |||||
| MC_CoordSystem | CoordSystem | |||||