KINGSTAR
KINGSTAR 由許多元件所組成,以下將一一介紹。
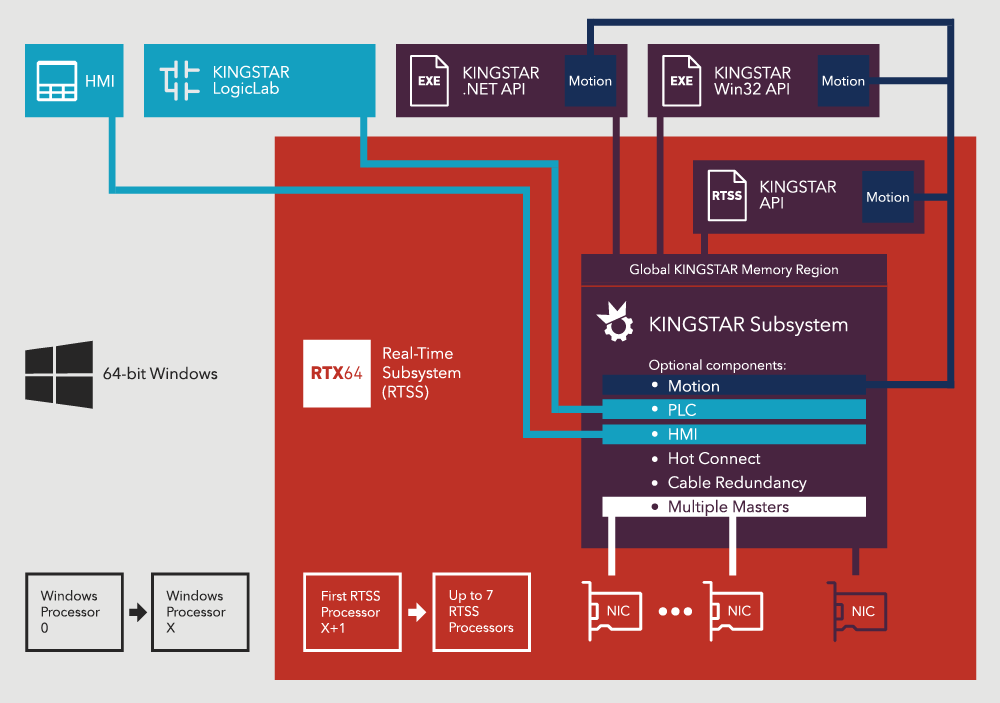
KINGSTAR 子系統
KINGSTAR 子系統包含幾個元件:
總線
總線為 KINGSTAR 子系統的基本元件,是一通信和配置函式庫,封裝了 KINGSTAR 的所有 EtherCAT 功能。總線直接連接並控制用於所有 EtherCAT 網路活動的網路介面卡,負責傳送和接收網路介面卡上的封包。總線啟動時會掃描其 EtherCAT 網路,查找網路上可用的硬體並自動配置設備,總線一啟動,硬體即可使用。
EtherCAT 即時數據被儲存在循環封包內,使用總線 API 函式即可取得包含即時數據封包內的變數。總線將 EtherCAT 的複雜性隱藏,並以 CANopen 介面代替 EtherCAT (CoE) 驅動器呈現。有了總線,無需知道變數在哪裡、供應商硬體之間的差異或如何處理同步問題,這些將全部交由總線處理。
運動 (Motion)
運動的功能如同運動控制卡,其差別在於它是軟體,能與多樣的硬體一起協作,亦可使用普遍的程式語言來開發運動應用程式。Motion 用來控制軸的介面係遵循 PLCopen 運動控制標準所設計的。
Motion 架構可讓多個應用程式連接相同的 EtherCAT 運行,其中一些是Windows 程式,一些是即時 (real-time) 程式,也就是說可以同時在一台裝置上控制多個不同的工作站台。可將裝置分成多個站,並使用各個應用程式來控制各自的站台,在單一電腦的應用程式都運行於相同的 Motion 和 EtherCAT 總線之上,如此一來可根據需要,為機器的每個部分使用不同的程式語言,在不同的環境中開發應用程式,而工程師可在不擔心干擾的情況下編寫他們的程式。
注意:若多個 KINGSTAR 應用程式同時運行,請在關閉最後一個應用程式後停用 KINGSTAR 子系統,若有應用程式在連接 KINGSTAR 子系統的情況下關閉該子系統,則可能會導致電腦故障。
介面
KINGSTAR 提供了數種應用程式開發介面:
- RT
- Win 32 (Windows API)
- .NET
- PLC
以上皆可存取 KINGSTAR 函式庫。由這些介面創建的所有應用程式皆可使用 KINGSTAR 全域記憶體同步化。RT 和 Win 32 使用 C/C++、.NET 使用 C# 和 VB,而 PLC 則使用 IEC 61131-3 定義的程式語言;而 PLC,KINGSTAR 函式塊可透過 KINGSTAR LogicLab 取得。
熱插拔
EtherCAT 熱插拔功能可讓 EtherCAT 在網路已經在運行的情況下添加硬體,由於 KINGSTAR 使用自動配置,它會檢測添加的硬體並自動對其進行配置,一旦新硬體配置完成,就可供應用程式使用。
多主站
多主裝置功能允許您創建多個 KINGSTAR 實例並使用它們同時控制不同的網卡。可以使用 Create 函式中的參數啟用此功能。
KINGSTAR 全域記憶體
因為 KINGSTAR 能讓不同程式語言撰寫的多個應用程式連到子系統,所以您需要一種簡單的方式讓這些應用程式彼此溝通,解決之道就是 KINGSTAR 全域記憶體,該記憶體由 KINGSTAR 子系統控制。您可以在全域記憶體中讀寫任何變數,無需知道變數位置,所有介面,無論是 PLC、C/C++、Win32 和 Windows .NET,都有 API 可以存取 KINGSTAR 全域記憶體。如此,您可以讓多個應用程式共用變數,即使它們是在 Windows 或 RTX64 上,抑或是用不同程式語言撰寫而成。
運動插補與 PID
機器或機器人控制器都需要運動插補和 PID 控制馬達。有了 Motion,您可以決定每一軸是要使用應用程式、KINGSTAR 子系統、還是伺服驅動器來控制,若不想要在應用程式中使用運動插補和 PID,KINGSTAR 子系統可以提供相同的配置選項讓您設定所有的馬達,無論馬達的類型(線性、伺服或步進)或廠牌為何。
例如:您需要建置機器人,這表示您需要機器人控制器。這個控制器可以是在 Motion 下使用 C/C++ 開發的即時應用程式,能夠自行運算插補控制六軸,加上一或兩張 I/O 介面卡。旁邊有 PLC,可以讓終端使用者或系統整合商在系統中增加更多硬體、I/O 或馬達,然後透過 PLC 控制它們,以及用 Windows 或其他機器上的應用程式同步化這些裝置。
注意:運動插補和 PID 通常是即時功能(每個週期執行),所以它們應該要在即時應用程式上執行,而非在 Windows 上執行。