homingLatch
Uses a servo drive's touch probe feature to get the home position, and uses probe ID 0 in KINGSTAR as the trigger.
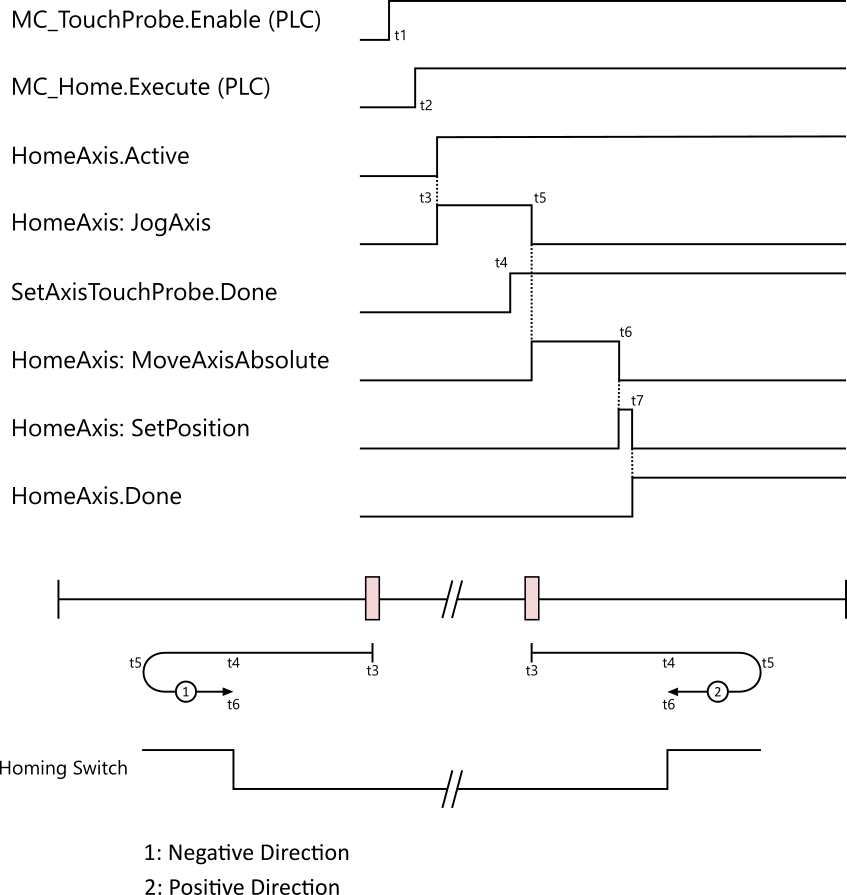
To use homingLatch, you need to call SetAxisTouchProbe with the following settings:
- Set touch probe ID to zero in TriggerInput.
- Select a Z signal or a digital input (DI) as your touch probe's trigger in TriggerInput.
Next, use HomeAxis to home an axis. As soon as HomeAxis is active, the axis starts a jog move, during which the SetAxisTouchProbe is done. After the jog is finished, HomeAxis starts an Absolute move. If you use a Z signal, KINGSTAR will record the actual position of the axis and set that position as home after it receives the Z signal. If you use a DI, and the DI is connected to a sensor or a switch, KINGSTAR will set the position as home when the sensor is touched or the switch is flipped. Finally, the HomeAxis is done.