Coordinate transformation
When you control a robot, you may want to select a suitable coordinate system to move the group so that you can better control where the robotic arm is moving and how many degrees it rotates. By default, you can use Axis Coordinate System (ACS) in KINGSTAR. If you have Kinematic Package, you can use Machine Coordinate System (MCS) and Product Coordinate System (PCS). The definition of ACS, MCS, and PCS vary between manufacturers. The following is a common practice.
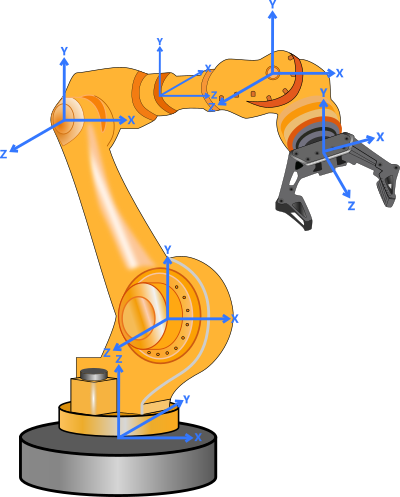
Axis Coordinate System (ACS)
In ACS, the origin is usually set at the joints of a robotic arm.
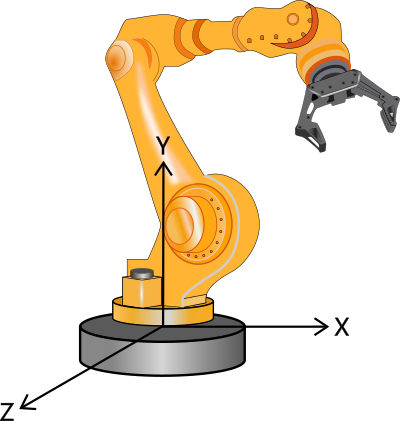
Machine Coordinate System (MCS)
In MCS, the origin is usually set at the base of a robotic arm. Typically, Cartesian coordinate system is used in this system.
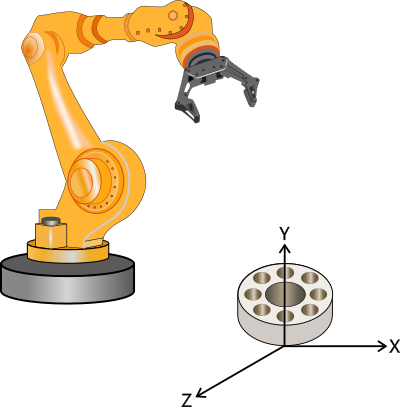
Product Coordinate System (PCS)
In PCS, the origin is determined by users. It is usually set in the work area in which the workpiece will be machined. For example, it can be set at the base of a workpiece.
Tutorials
The order to transform the coordinate system is ACS->MCS->PCS. You must follow this order to transform coordinates.