Jog group
Jog group moves a group continuously at the specified velocity. After you send a Jog command, the group will accelerate to the specified velocity and keeps moving at that speed, until you stop it.
Functions
JogGroup: moves a group at a specified velocity without a target or distance. The group keeps moving until it is stopped.
GetAGroupVelocity: displays the velocity of a group. For further details, see Get and set group values.
GetAGroupPosition: displays the end position of a group. For further details, see Get and set group values.
Stop a Jog move
You can use HaltGroup or StopGroup to stop a Jog move. For more information about how to use these functions, see Stop a group movement.
- HaltGroup: decelerates a group and puts it into the GroupStandstill state after the velocity of the group reaches zero. The group can be moved by other motion functions later.
- StopGroup: decelerates a group and puts it into the GroupStopping state after the velocity of the group reaches zero. This function is for an emergency stop. When a group is in GroupStopping, other functions can't move the group, unless the state is aborted by AbortCommand.
Code
In GroupMotion.cpp, add the following code:
Copy
JogGroup
VOID GroupJog(int Group)
{
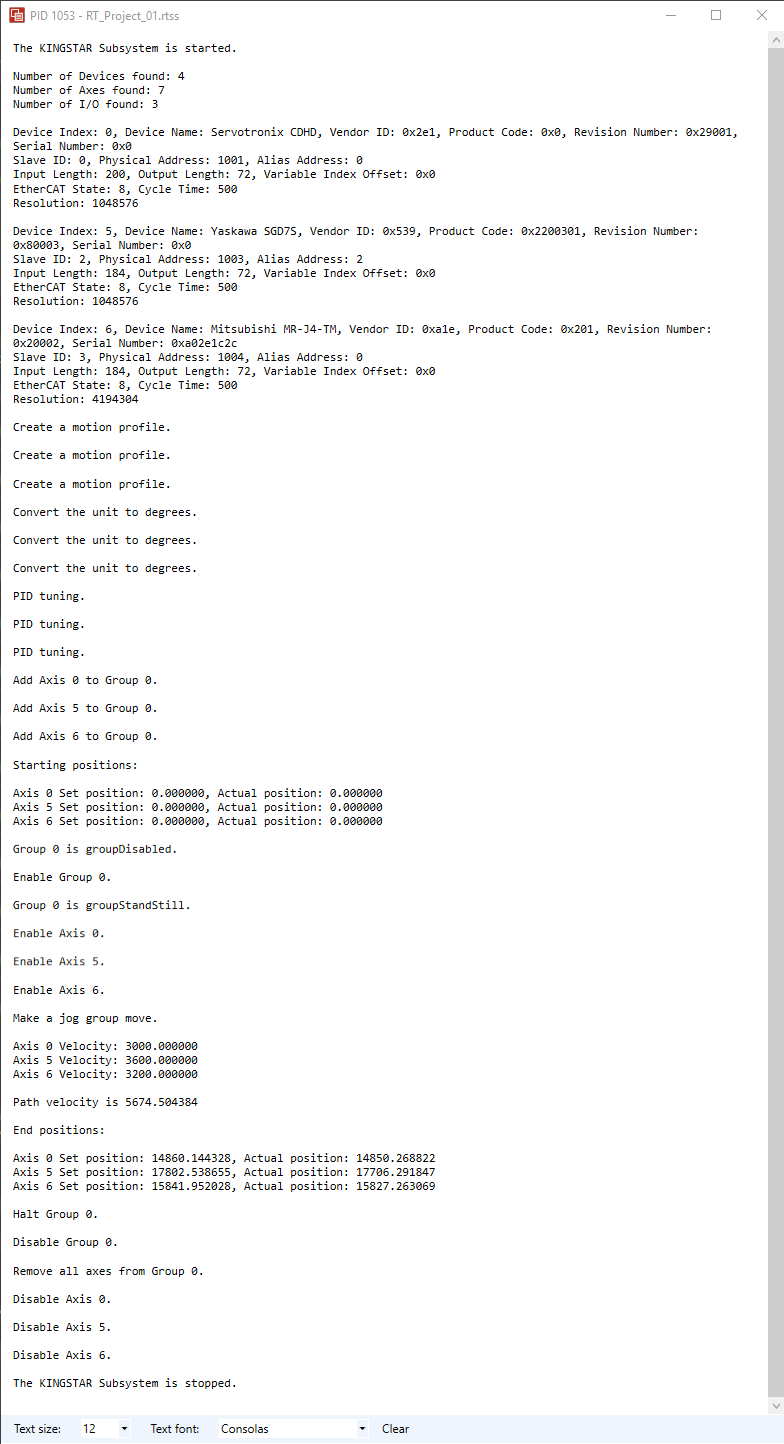
RtPrintf("Make a jog group move.\n\n");
const int LENGTH = 3; //The length of the Velocity array.
double Velocity[LENGTH] = { 3000, 3600, 3200 };
//Start a jog move.
KsCommandStatus jogMove = JogGroup(Group, LENGTH, Velocity, MAXIMUM_ACCELERATION,
MAXIMUM_DECELERATION, MAXIMUM_JERK, mcAxisCoordSystem);
//Let the axis moves for a while.
Sleep(5000);
GetAGroupVelocity(Group);
RtPrintf("End positions:\n\n");
GetAGroupPosition(Group);
}
Output: