| Function block | MC_Jog | ||
|---|---|---|---|
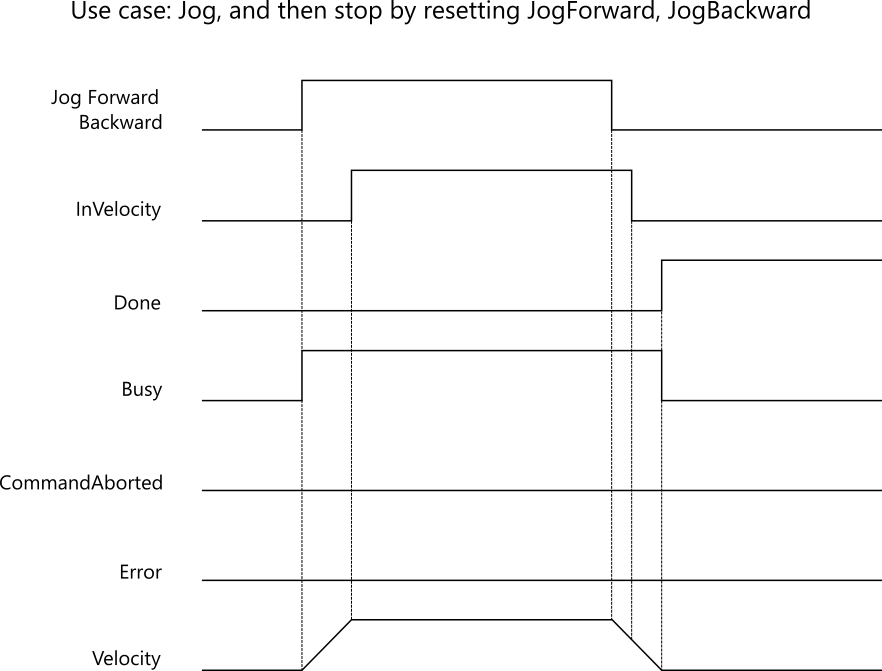
| Commands a never-ending controlled motion at a specified velocity. Unlike MC_MoveVelocity, MC_Jog doesn't have BufferMode. It keeps moving until the jog input is reset. | |||
| VAR_IN_OUT | |||
| V | AxisIn | AXIS_REF | Reference to an axis. |
| VAR_INPUT | |||
| V | JogForward | BOOL | Moves to the positive direction. When the axis starts moving, it becomes TRUE; when halted, it becomes FALSE. |
| V | JogBackward | BOOL | Moves to the negative direction. When the axis starts moving, it becomes TRUE; when halted, it becomes FALSE. |
| V | Velocity | LREAL | Value of the specified velocity. [unit/second] |
| V | Acceleration | LREAL | Value of the acceleration. Always positive. The unit is determined by MC_ProfileType. (increasing power of the motor) [unit/second2] or [second] |
| V | Deceleration | LREAL | Value of the deceleration. Always positive. The unit is determined by MC_ProfileType. (decreasing power of the motor) [unit/second2] or [second] |
| V | Jerk | LREAL | Value of the jerk. The unit is determined by MC_ProfileType. [unit/second3] or [second] |
| V | BufferMode | MC_BufferMode | Defines how to blend the velocity of two functions. |
| VAR_OUTPUT | |||
| V | InVelocity | BOOL | Commanded velocity reached. |
| V | Done | BOOL | The function block is stopped. |
| V | Busy | BOOL | The function block is not finished and new output values are to be expected. |
| V | Active | BOOL | The function block is controlling the axis. |
| V | CommandAborted | BOOL | The command is aborted by another command. |
| V | Error | BOOL | Signals that an error has occurred within the function block. |
| V | ErrorID | MC_Error | Error identification. |
|
|||
| MC_Jog | ||||||
|---|---|---|---|---|---|---|
| AXIS_REF | AxisIn | Axis | AXIS_REF | |||
| BOOL | JogForward | InVelocity | BOOL | |||
| BOOL | JogBackward | Done | BOOL | |||
| LREAL | Velocity | Busy | BOOL | |||
| LREAL | Acceleration | Active | BOOL | |||
| LREAL | Deceleration | CommandAborted | BOOL | |||
| LREAL | Jerk | Error | BOOL | |||
| MC_BufferMode | BufferMode | ErrorID | MC_Error | |||