| Function block | MC_MoveContinuousRelative | ||
|---|---|---|---|
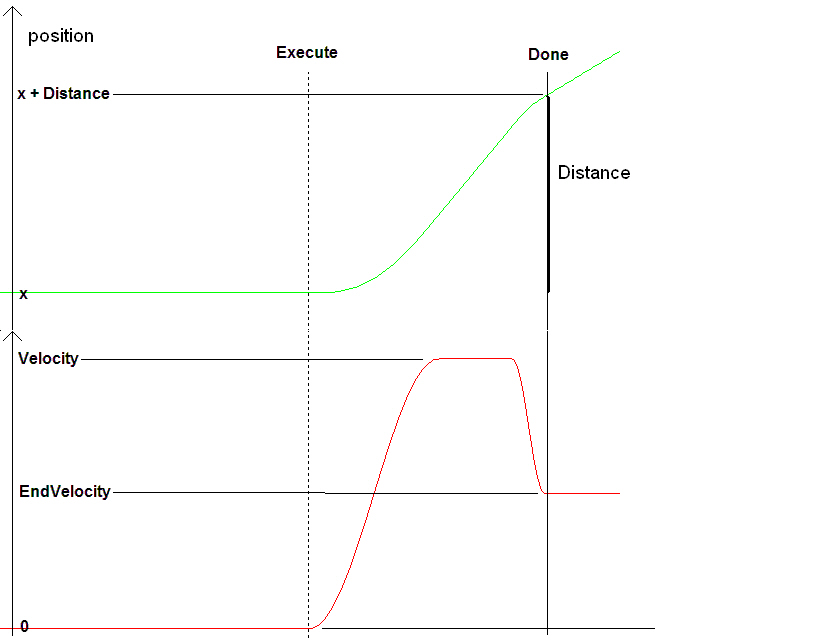
| Commands a controlled motion of a specified relative distance ending with the specified velocity. | |||
| VAR_IN_OUT | |||
| B | AxisIn | AXIS_REF | Reference to an axis. |
| VAR_INPUT | |||
| B | Execute | BOOL | Starts the motion at rising edge. |
| E | ContinuousUpdate | BOOL | If TRUE, when the function block (FB) is running and the values of the parameters are updated, the FB will use the new value. If FALSE, the FB won't use the new value. |
| B | Distance | LREAL | Relative distance for the motion. [unit] |
| B | Velocity | LREAL | Value of the maximum velocity. [unit/second] |
| B | EndVelocity | LREAL | Value of the end velocity. Signed value. [second] |
| E | Acceleration | LREAL | Value of the acceleration. The unit is determined by MC_ProfileType. [unit/second2] or [second] |
| E | Deceleration | LREAL | Value of the deceleration. The unit is determined by MC_ProfileType. [unit/second2] or [second] |
| E | Jerk | LREAL | Value of the jerk. The unit is determined by MC_ProfileType. [unit/second3] or [second] |
| E | BufferMode | MC_BufferMode | Defines how to blend the velocity of two function blocks. |
| VAR_OUTPUT | |||
| B | InEndVelocity | BOOL | Commanded distance reached and running at requested end velocity. |
| E | Busy | BOOL | The function block is not finished and new output values are to be expected. |
| E | Active | BOOL | The function block is controlling the axis. |
| E | CommandAborted | BOOL | The command is aborted by another command. |
| B | Error | BOOL | Signals that an error has occurred within the function block. |
| B | ErrorID | MC_Error | Error identification. |
|
|||
| MC_MoveContinuousRelative | ||||||
|---|---|---|---|---|---|---|
| AXIS_REF | AxisIn | Axis | AXIS_REF | |||
| BOOL | Execute | InEndVelocity | BOOL | |||
| BOOL | ContinuousUpdate | Busy | BOOL | |||
| LREAL | Distance | Active | BOOL | |||
| LREAL | Velocity | CommandAborted | BOOL | |||
| LREAL | EndVelocity | Error | BOOL | |||
| LREAL | Acceleration | ErrorID | MC_Error | |||
| LREAL | Deceleration | |||||
| LREAL | Jerk | |||||
| MC_BufferMode | BufferMode | |||||
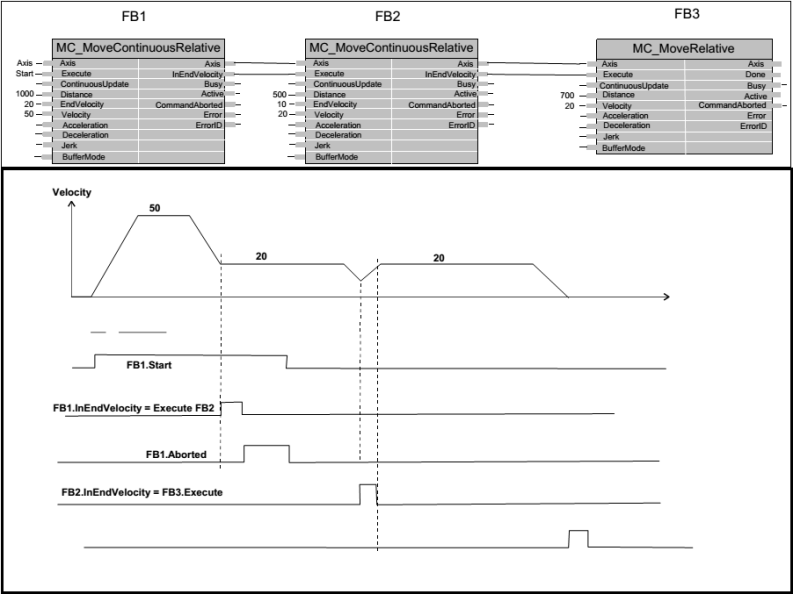
These two sampling traces show the effect of the sign of the value of the input EndVelocity:
EndVelocity with positive direction
EndVelocity with negative direction
Example of MC_MoveContinuousRelative