| Function block | MC_SetOverride | ||
|---|---|---|---|
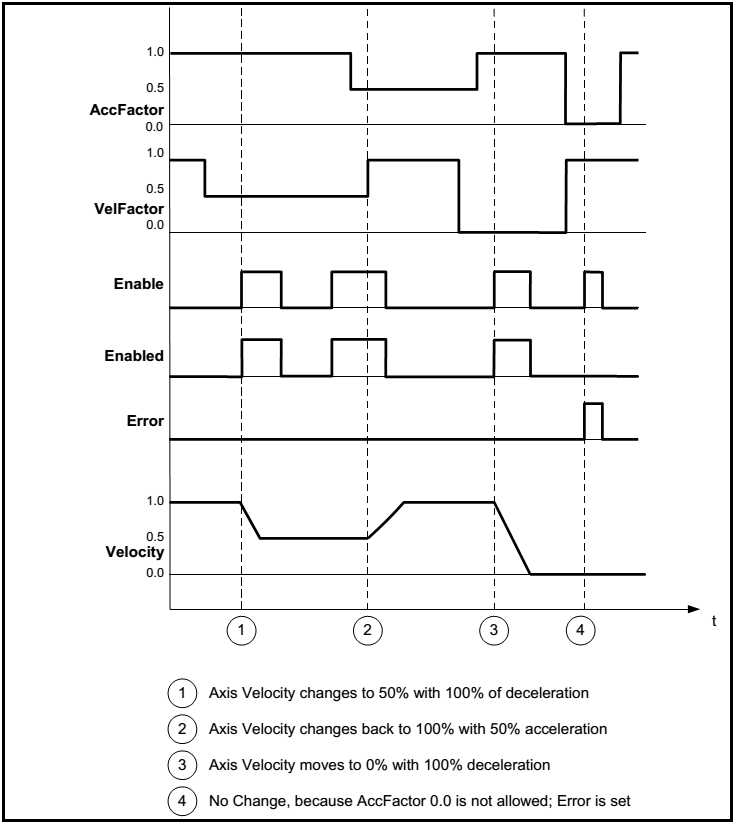
| Sets the override values for the whole axis, and all functions that are working on that axis. The override parameters contribute as a factor to the calculation of the commanded velocity, acceleration and jerk of the motion. | |||
| VAR_IN_OUT | |||
| B | AxisIn | AXIS_REF | Reference to an axis. |
| VAR_INPUT | |||
| B | Enable | BOOL | If TRUE, it writes the value of the override factor continuously. If FALSE it should keep the last value. |
| B | VelFactor | LREAL | New override factor for the velocity. |
| E | AccFactor | LREAL | New override factor for the acceleration or deceleration. |
| E | JerkFactor | LREAL | New override factor for the jerk. |
| VAR_OUTPUT | |||
| B | Enabled | BOOL | Signals that the override factors are set successfully. |
| E | Busy | BOOL | The function block is not finished and new output values are to be expected. |
| B | Error | BOOL | Signals that an error has occurred within the function block. |
| E | ErrorID | MC_Error | Error identification. |
|
|||
| MC_SetOverride | ||||||
|---|---|---|---|---|---|---|
| AXIS_REF | AxisIn | Axis | AXIS_REF | |||
| BOOL | Enable | Enabled | BOOL | |||
| LREAL | VelFactor | Busy | BOOL | |||
| LREAL | AccFactor | Error | BOOL | |||
| LREAL | JerkFactor | ErrorID | MC_Error | |||