| Function block | MC_Stop | ||
|---|---|---|---|
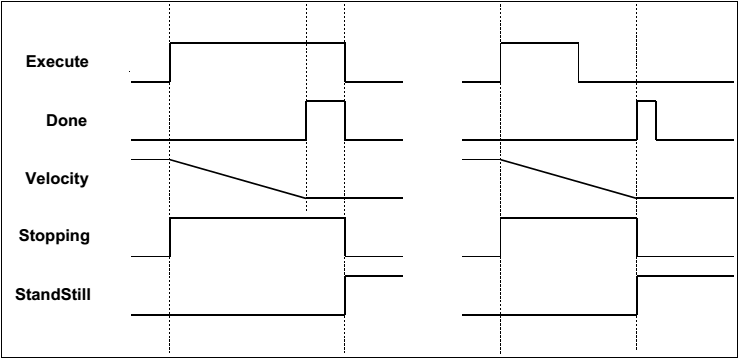
| Commands a controlled motion stop and sets the axis to the Stopping state. It aborts any ongoing function block execution. While the axis is in the Stopping state, other function blocks can't move the axis. After the axis has reached velocity zero, the Done output is set to TRUE immediately. The axis remains in the Stopping state as long as Execute is TRUE or velocity zero is not yet reached. As soon as Done is set and Execute is FALSE, the axis goes to the state Standstill. | |||
| VAR_IN_OUT | |||
| B | AxisIn | AXIS_REF | Reference to an axis. |
| VAR_INPUT | |||
| B | Execute | BOOL | Starts the motion at rising edge. |
| E | Deceleration | LREAL | Value of the deceleration. The unit is determined by MC_ProfileType. [unit/second2] or [second] |
| E | Jerk | LREAL | Value of the jerk. The unit is determined by MC_ProfileType. [unit/second3] or [second] |
| VAR_OUTPUT | |||
| B | Done | BOOL | Zero velocity reached. |
| E | Busy | BOOL | The function block is not finished and new output values are to be expected. |
| E | CommandAborted | BOOL | The command is aborted by switching off power (only MC_Power can abort it). |
| B | Error | BOOL | Signals that an error has occurred within the function block. |
| E | ErrorID | MC_Error | Error identification. |
|
|||
| MC_Stop | ||||||
|---|---|---|---|---|---|---|
| AXIS_REF | AxisIn | Axis | AXIS_REF | |||
| BOOL | Execute | Done | BOOL | |||
| LREAL | Deceleration | Busy | BOOL | |||
| LREAL | Jerk | CommandAborted | BOOL | |||
| Error | BOOL | |||||
| ErrorID | MC_Error | |||||
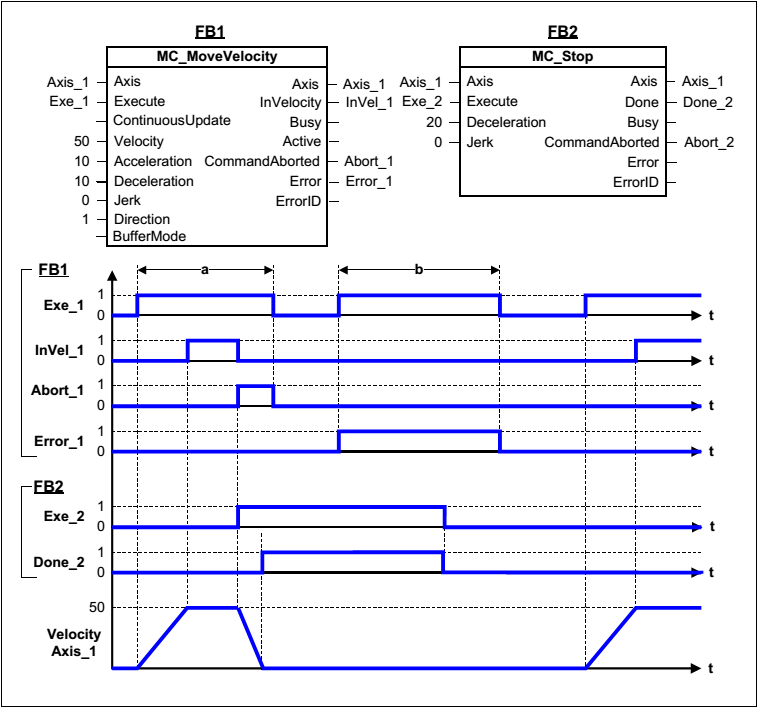
The example below shows the behavior in combination with a MC_MoveVelocity.
- A rotating axis is ramped down using the function block (FB) MC_Stop.
- The axis rejects motion commands as long as MC_Stop's parameter Execute = TRUE. The MC_MoveVelocity FB reports an error indicating the busy MC_Stop command.