| 功能块 | MC_GearIn | ||
|---|---|---|---|
| 命令从轴和主轴的速度之间的比率。 | |||
| VAR_IN_OUT | |||
| B | MasterIn | AXIS_REF | 主轴的参考。 |
| B | SlaveIn | AXIS_REF | 从轴的参考。 |
| VAR_INPUT | |||
| B | Execute | BOOL | 在上升边缘开始齿轮运动。 |
| E | ContinuousUpdate | BOOL |
若为 TRUE,则当功能块 (FB) 正在执行且参数值正被更新时,FB 将使用新值;若为 FALSE,则 FB 不会使用新值。 注意:RatioNumerator 与 RatioDenominator 无法更新,但 Acceleration、Deceleration 及 Jerk 可以。 |
| V | Permanent | BOOL |
决定马达停用后是否保留齿轮状态。 TRUE:即使马达停用时仍保留齿轮状态,例如当主轴启用时从轴也会跟著启用,而当主轴发生错误从轴也会发生错误。 FALSE:马达停用后不会保留齿轮状态。 |
| B | RatioNumerator | INT | 齿轮比率分子。 |
| B | RatioDenominator | UINT | 齿轮比率分母。 |
| E | MasterValueSource | MC_Source |
定义同步的来源:
注意:尚未支援 mcSecondEncoderValue。 |
| E | Acceleration | LREAL | 齿轮加速度。 |
| E | Deceleration | LREAL | 齿轮减速度。 |
| E | Jerk | LREAL | 齿轮加加速度。 |
| E | BufferMode | MC_BufferMode | 定义如何融合两功能块的速度。 |
| VAR_OUTPUT | |||
| B | InGear | BOOL | 轴的同步状态。TRUE:同步已完成;FALSE:从轴与主轴同步中。 |
| E | Busy | BOOL | 功能块尚未完成且预期将有新的输出值。 |
| E | Active | BOOL | 功能块正在控制轴。 |
| E | CommandAborted | BOOL | 命令被另一个命令中止。 |
| B | Error | BOOL | 功能块中出现错误的讯号。 |
| E | ErrorID | MC_Error | 错误识别。 |
|
|||
| MC_GearIn | ||||||
|---|---|---|---|---|---|---|
| AXIS_REF | MasterIn | Master | AXIS_REF | |||
| AXIS_REF | SlaveIn | Slave | AXIS_REF | |||
| BOOL | Execute | InGear | BOOL | |||
| BOOL | ContiunousUpdate | Busy | BOOL | |||
| BOOL | Permanent | Active | BOOL | |||
| INT | RatioNumerator | CommandAborted | BOOL | |||
| UINT | RatioDenominator | Error | BOOL | |||
| MC_Source | MasterValueSource | ErrorID | MC_Error | |||
| LREAL | Acceleration | |||||
| LREAL | Deceleration | |||||
| LREAL | Jerk | |||||
| MC_BufferMode | BufferMode | |||||

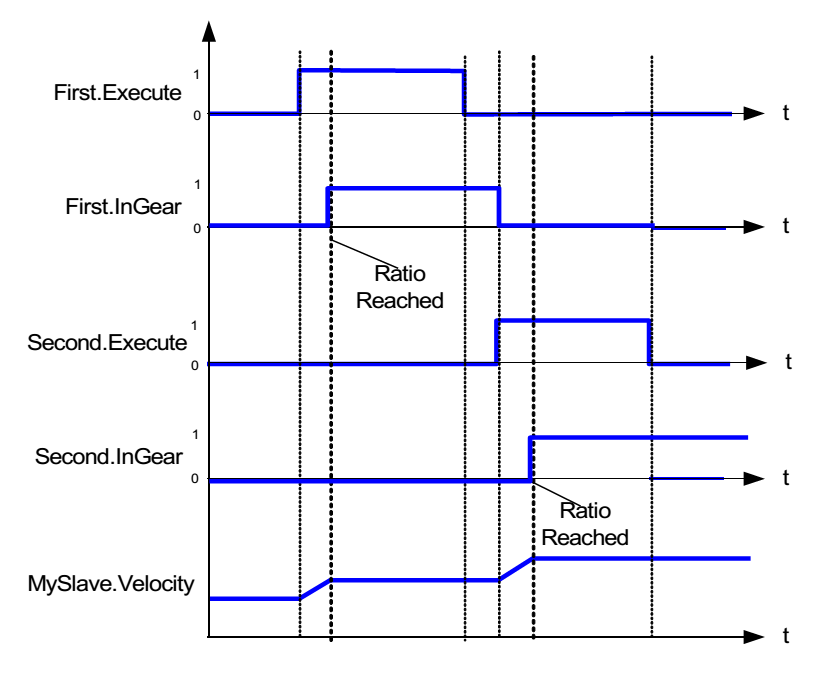
齿轮时序图