| 功能块 | MC_MoveContinuousRelative | ||
|---|---|---|---|
| 命令指定相对距离且以指定的速度结束的控制运动。 | |||
| VAR_IN_OUT | |||
| B | AxisIn | AXIS_REF | 轴的参考。 |
| VAR_INPUT | |||
| B | Execute | BOOL | 在上升边缘开始运动。 |
| E | ContinuousUpdate | BOOL | 若为 TRUE,则当功能块 (FB) 正在执行且参数值正被更新时,FB 将使用新值;若为 FALSE,则 FB 不会使用新值。 |
| B | Distance | LREAL | 运动的相对距离。[单位]。 |
| B | Velocity | LREAL | 最大速度值 [单位/每秒]。 |
| B | EndVelocity | LREAL | 结束速度值,为带正负号的值,[秒]。 |
| E | Acceleration | LREAL | 加速度值,单位由 MC_ProfileType 决定为 [单位/每秒2] 或 [每秒]。 |
| E | Deceleration | LREAL | 减速度值,单位由 MC_ProfileType 决定为 [单位/每秒2] 或 [每秒]。 |
| E | Jerk | LREAL | 加加速度值。单位由 MC_ProfileType 决定为 [单位/每秒3] 或 [每秒]。 |
| E | BufferMode | MC_BufferMode | 定义如何融合两功能块的速度。 |
| VAR_OUTPUT | |||
| B | InEndVelocity | BOOL | 已达到指令距离且依要求的终点速度运行。 |
| E | Busy | BOOL | 功能块尚未完成且预期将有新的输出值。 |
| E | Active | BOOL | 功能块正在控制轴。 |
| E | CommandAborted | BOOL | 命令被另一个命令中止。 |
| B | Error | BOOL | 功能块中出现错误的讯号。 |
| B | ErrorID | MC_Error | 错误识别。 |
|
|||
| MC_MoveContinuousRelative | ||||||
|---|---|---|---|---|---|---|
| AXIS_REF | AxisIn | Axis | AXIS_REF | |||
| BOOL | Execute | InEndVelocity | BOOL | |||
| BOOL | ContinuousUpdate | Busy | BOOL | |||
| LREAL | Distance | Active | BOOL | |||
| LREAL | Velocity | CommandAborted | BOOL | |||
| LREAL | EndVelocity | Error | BOOL | |||
| LREAL | Acceleration | ErrorID | MC_Error | |||
| LREAL | Deceleration | |||||
| LREAL | Jerk | |||||
| MC_BufferMode | BufferMode | |||||
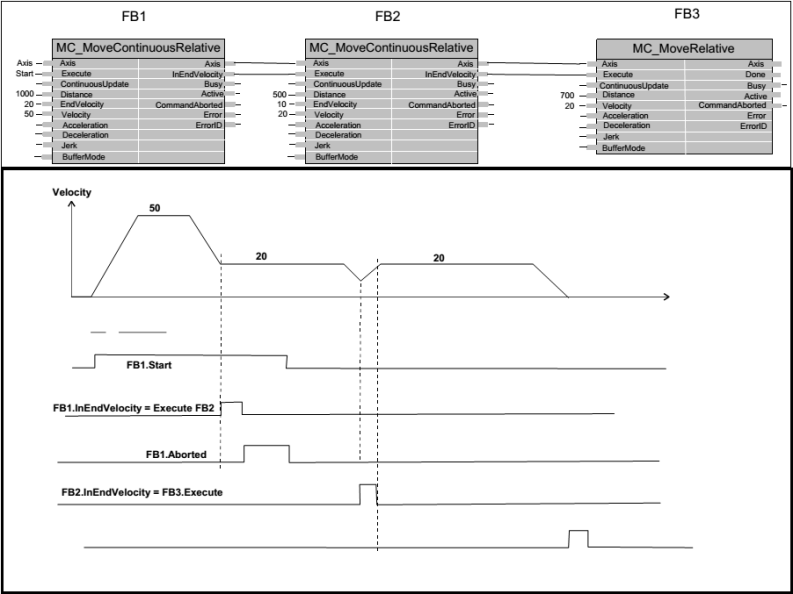
这两个范例轨迹显示了输入 EndVelocity 值符号的影响:
正方向 EndVelocity
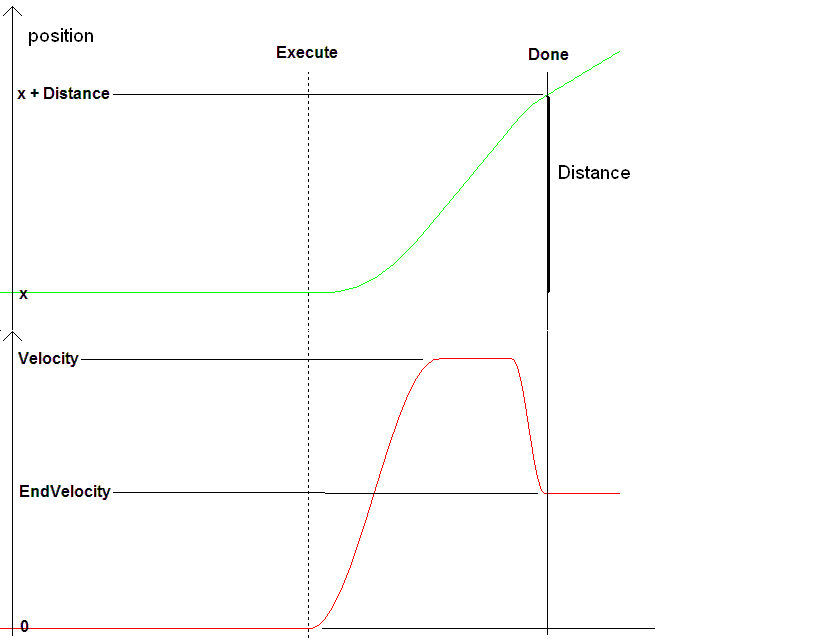
负方向 EndVelocity
MC_MoveContinuousRelative 之范例