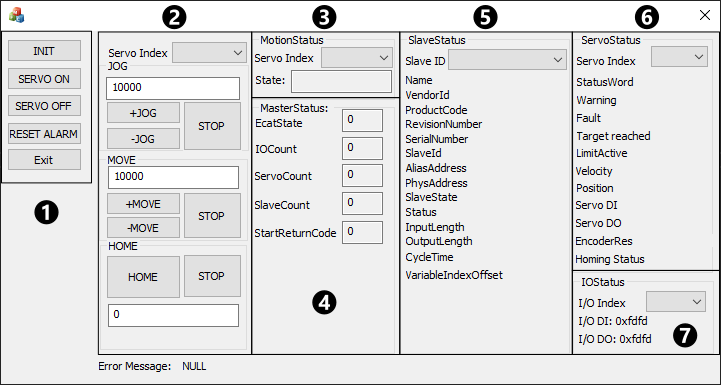
主选单
控制 KINGSTAR 子系统与轴的互动。
INIT:连接或断连 KINGSTAR 子系统。
SERVO ON:启用轴。
SERVO OFF:停用轴。
RESET ALARM:重设轴的警报。
Exit:退出 Motion 范例。
Motion 控制
此区域包含轴之设定,提供可测试轴之基本运动。
Servo Index:轴索引(伺服马达)。此索引以零为起始,并依照 EtherCAT 网路的伺服驱动器顺序排列,例如有八个 EtherCAT 从站,每个伺服驱动器都有一个轴,则以下为其顺序:
- 伺服驱动器 – 从站 ID:0 – 伺服器索引:0
- 伺服驱动器 – 从站 ID:1 – 伺服器索引:1
- I/O 模组 – 从站 ID:2 – I/O 索引:0
- I/O 模组 – 从站 ID:3 – I/O 索引:1
- 伺服驱动器 – 从站 ID:4 – 伺服器索引:2
- 伺服驱动器 – 从站 ID:5 – 伺服器索引:3
- I/O 模组 – 从站 ID:6 – I/O 索引:2
- I/O 模组 – 从站 ID:7 – I/O 索引:3
在复杂的案例中,当伺服驱动器又两个或以上的轴,则顺序为以下:
- 伺服驱动器 – 从站 ID:0 – 伺服器索引:0
- 伺服驱动器 – 从站 ID:1 – 伺服器索引:1, 2, 3, 4
- I/O 模组 – 从站 ID:2 – I/O 索引:0
- I/O 模组 – 从站 ID:3 – I/O 索引:1
- 伺服驱动器 – 从站 ID:4 – 伺服器索引:5
- 伺服驱动器 – 从站 ID:5 – 伺服器索引:6
- I/O 模组 – 从站 ID:6 – I/O 索引:2
- I/O 模组 – 从站 ID:7 – I/O 索引:3
若添加了模拟轴,则其亦将会包含在伺服器索引 (Servo Index) 列表,模拟轴的索引会在真实轴后面。
寸动 (Jog)
执行寸动运动。
Text box:寸动之速度。
+JOG:马达向前运行。
-JOG:马达向后运行。
STOP:停止寸动运动。
移动 (MOVE)
执行 MoveAxisRelative 移动。
Text box:移动之距离。
+MOVE:马达向前运行。
-MOVE:马达向后运行。
STOP:停止相对运动。
原点复归 (HOME)
将轴移动到已知位置。
HOME:将轴移动到已知位置。
STOP:停止原点复归。
Text box:轴所提供的原点复归模式。
MotionStatus
Servo Index:轴的索引。
State:轴状态。请见 McMotionState 类型。
MasterStatus
EtherCAT 主站的状态。说明请见 SubsystemStatus 结构,更多关于 StartReturnCode 之资讯请见 KsError 类型中的开始 (Startup) 错误。
SlaveStatus
EtherCAT 从站之状态。说明请见 SlaveStatus 结构,
Slave ID:装置的 EtherCAT ID。其对应于装置在 EtherCAT 回圈中的位置,此 ID 从零开始,不受别名影响。
ServoStatus
轴状态。
Servo Index:轴的索引。
StatusWord 至 LimitActive:CANopen 状态。
Velocity 至 Homing status:参数依伺服马达而以所不同。
I/OStatus
I/O Index:I/O 模组的索引。此索引由零开始并依照 EtherCAT 网路上的 I/O 模组顺序排列,更多关于索引的顺序请见:Motion 控制。
若添加了模拟 I/O 模组,则其亦将会包含在 I/O Index 列表,模拟 I/O 模组的索引会在真实 I/O 模组后面。
I/O DI:I/O 模组之数位输入。
I/O DO:I/O 模组之数位输出。