原點復歸 (Homing)
本章節說明原點復歸在 KINGSTAR 的運作方式。
homingLatch
使用伺服驅動器之位置抓取 (Touch Probe) 功能以獲取原點位置,並使用 KINGSTAR 中的位置抓取針 ID 0 作為觸發器。
欲使用 homingLatch,需使用以下方式呼叫 SetAxisTouchProbe。
- 將 TriggerInput 中的位置抓取功能 ID 設為零。
- 在 TriggerInput 中,選擇 Z 相訊號或數位輸入 (DI) 作為位置抓取功能的觸發器。
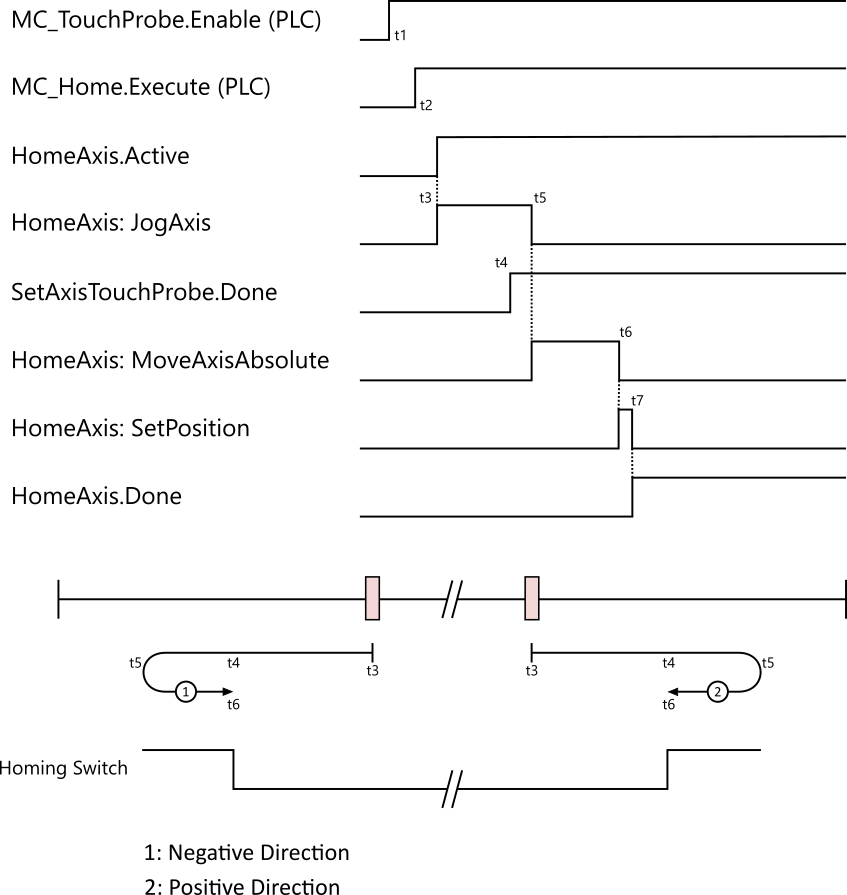
接著,使用 HomeAxis 將軸復歸原點,HomeAxis 一旦激活 (t3),軸就會開始寸動運動 (jog motion,t3 – t5)。 SetAxisTouchProbe 會在寸動運動的過程中完成 (t4)。寸動結束後,HomeAxis 開始絕對運動,若使用 Z 相訊號,KINGSTAR 會記錄軸的實際位置且在收到 Z 相訊號時將該位置設為原位;若使用 DI ,且此 DI 連接到傳感器或開關,則在觸摸感測器或扳動開關時 KINGSTAR 會將位置設置為原點,最後,SetAxisTouchProbe 即完成。
下圖示例各原點復歸狀態的時序:請注意,PLC 功能塊的名稱與 RT/Win32 功能的名稱不同,狀態的意義(如 Active 和 Done)可在 KsCommandStatus 結構找到。
homingSoft 與 homingSensor
此兩者使用原點復歸感測器獲取原點位置。欲使用 homingSoft 或 homingSensor,需指定一數位輸入 (DI),該 DI 可為在 I/O 模組或伺服驅動器中的位元,而此 DI 可連接到一感測器上,因此當軸移動時且觸碰到感測器,該位元將會轉為 true(若為平常呈關閉狀態的感測器,則為 false)。
homingSoft 與 homingSensor 的運作方式相似,下列以粗體字表示其二者的不同處:
homingSoft
- 軸以高速沿預設的原點復歸方向移動。
- 每次觸碰到感測器時,軸都會反轉方向,因為只要接觸感測器,感測器的訊號就會發生變化。
- 每次反轉方向速度將除以 10,直到在低速下找到預設方向的感測器為止。
homingSensor
- 軸以高速沿預設的原點復歸方向移動。
- 軸的移動方向由感測器的訊號決定。若訊號為零,則軸向前移動; 若訊號為 1,則向後移動。
- 每次反轉方向速度將除以 10,直到在低速下找到預設方向的感測器為止。
當軸在原點復歸時,會快速向前移動到感測器,且可能會超出其位置,然後再緩慢反向到達正確位置。
homingSoft 與 homingSensor 之運作方式
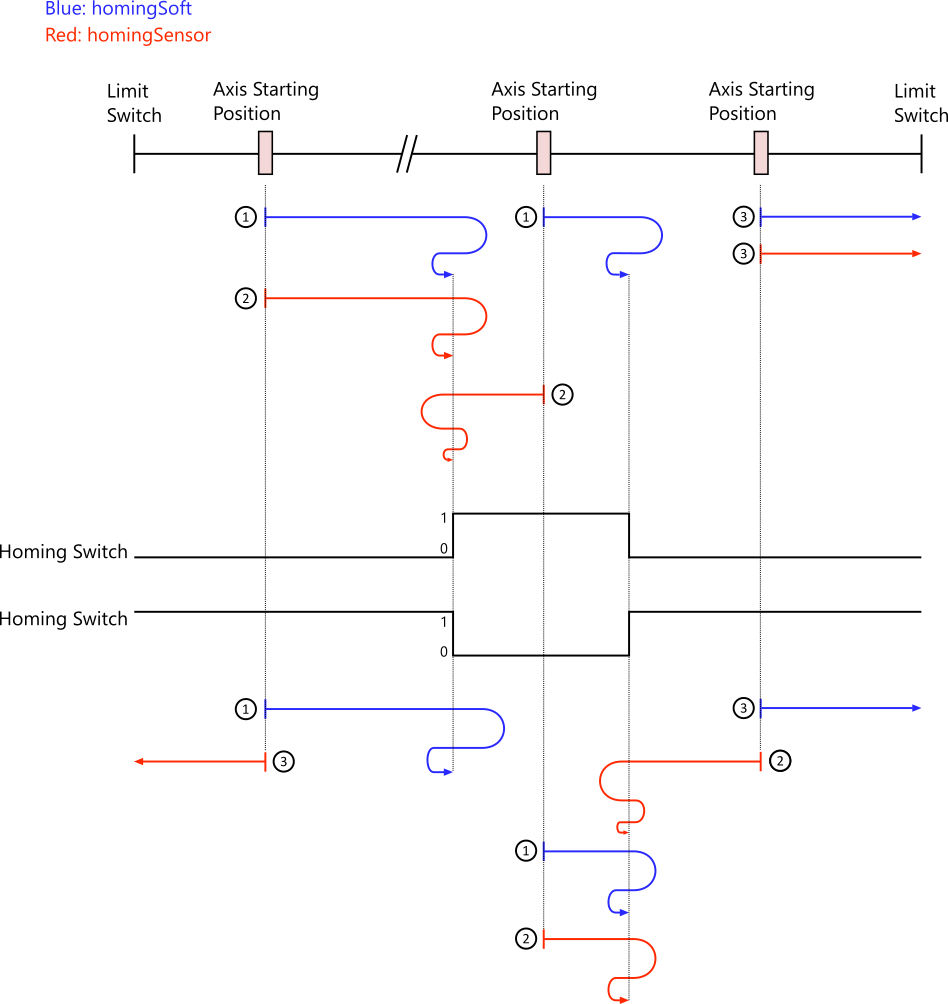
下圖展示當原點復歸方向為正時,homingSoft 和 homingSensor 在不同使用案例中的運作方式。
➀:軸高速向前移動,當期碰觸到感測器時,感測器的訊號改變,導致軸變換方向,軸緩慢向後移動,接著再以低速向前移動,直到其抵達目標。
➁:當感測器訊號為零時,軸向前移動;而當訊號為一時,軸則向後移動,當軸觸碰到感測器時會改變方向並圍繞感測器前後移動,直到其抵達目標。使用 homingSensor,若感測器的訊號為一時,軸開始移動時可能會開始向後移動,如此一來,其最後一個方向將會是向前,因為原點復歸方向為正值。
➂:軸觸碰到極限開關。原點復歸即取消。
homingSlave
使用伺服驅動器的原點復歸功能來使軸回歸原位。
homingOnPosition
將軸的當前位置設置為起始位置。

homingSlaveManual
將驅動器轉換為原點復歸模式並執行原點復歸,未設定原點復歸方式或設定檔,所有完成的原點復歸步驟也未檢查。
參見
RT 與 Win32-KINGSTAR 運動-軸 PTP 運動
RT 與 Win32-KINGSTAR 運動-軸控制
.NET API-運動類別-軸 PTP 運動
.NET API-運動類別-軸控制
.NET 類別-IAxis 介面-方法
PLC 功能塊-單軸-單軸運動
PLC 功能塊-單軸-位置抓取功能