| 功能塊 | MC_GearInPos | ||
|---|---|---|---|
|
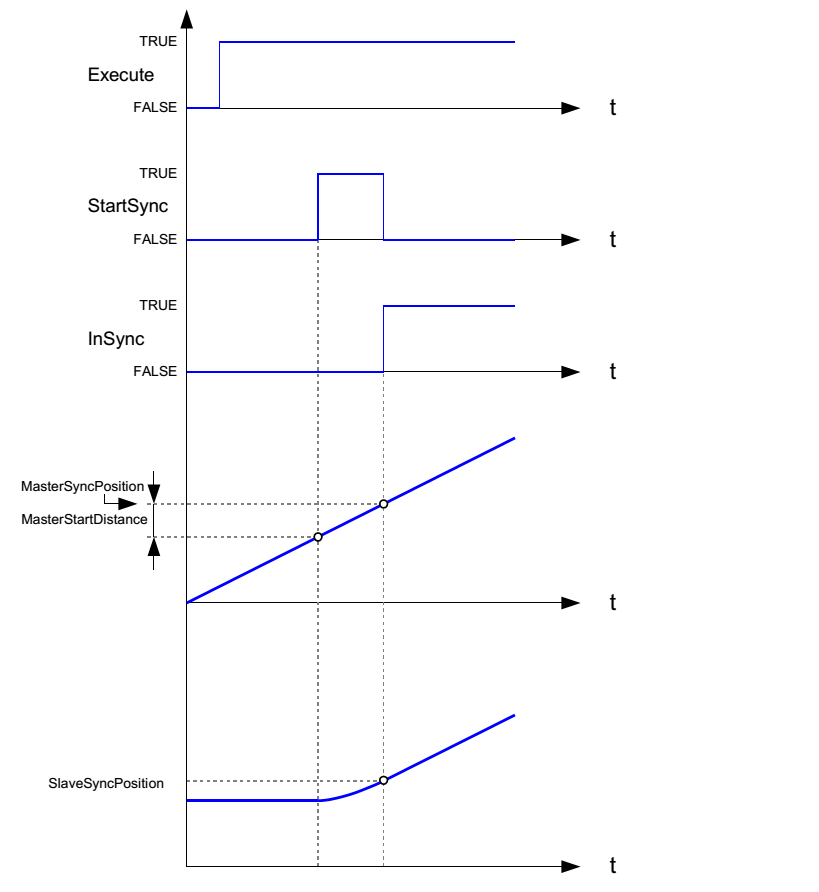
從同步點開始命令從軸和主軸位置之間的齒輪比率。 運作方式: 首先,從軸以 MC_MoveContinuousAbsolute 移動以正確的時間及速度到達 SlaveSyncPosition,Velocity, Acceleration 與 Deceleration 輸入即為此 MC_MoveContinuousAbsolute 移動所設,移動中的 StartSync 輸出為 TRUE,一旦此運動完成,InSync 輸出即為 TRUE。 GearInPos 設定檔:
|
|||
| VAR_IN_OUT | |||
| B | MasterIn | AXIS_REF | 主軸的參考。 |
| B | SlaveIn | AXIS_REF | 從軸的參考。 |
| VAR_INPUT | |||
| B | Execute | BOOL | 在上升邊緣開始齒輪運動。 |
| V | Permanent | BOOL |
決定馬達停用後是否保留齒輪狀態。 TRUE:即使馬達停用時仍保留齒輪狀態,例如當主軸啟用時從軸也會跟著啟用,而當主軸發生錯誤從軸也會發生錯誤。 FALSE:馬達停用後不會保留齒輪狀態。 |
| B | RatioNumerator | INT | 齒輪比率分子。 |
| B | RatioDenominator | UINT | 齒輪比率分母。 |
| E | MasterValueSource | MC_Source |
定義同步的來源:
注意:尚未支援 mcSecondEncoderValue。 |
| B | MasterSyncPosition | LREAL |
從軸與主軸同步時主軸的位置。 |
| B | SlaveSyncPosition | LREAL | 從軸與主軸同步時從軸的位置。 |
| E | SyncMode | MC_SyncMode | 定義同步的方式。 |
| E | MasterStartDistance | LREAL | 主軸移動至與從軸同步的距離(當從軸開始進入同步時)。 |
| E | Velocity | LREAL | 在 StartSync 與 InSync 間的時間差中的最大速度。 |
| E | Acceleration | LREAL | 在 StartSync 與 InSync 間的時間差中的最大加速度。 |
| E | Deceleration | LREAL | 在 StartSync 與 InSync 間的時間差中的最大減速度。 |
| E | Jerk | LREAL | 在 StartSync 與 InSync 間的時間差中的最大加加速度。 |
| E | BufferMode | MC_BufferMode | 定義如何融合兩功能塊的速度。 |
| VAR_OUTPUT | |||
| E | StartSync | BOOL | 命令之齒輪運動開始。 |
| B | InSync | BOOL | 軸的同步狀態。TRUE:同步已完成;FALSE:從軸與主軸同步中。 |
| E | Busy | BOOL | 功能塊尚未完成且預期將有新的輸出值。 |
| E | Active | BOOL | 功能塊正在控制軸。 |
| E | CommandAborted | BOOL | 命令被另一個命令中止。 |
| B | Error | BOOL | 功能塊中出現錯誤的訊號。 |
| E | ErrorID | MC_Error | 錯誤識別。 |
|
|||
| MC_GearInPos | ||||||
|---|---|---|---|---|---|---|
| AXIS_REF | MasterIn | Master | AXIS_REF | |||
| AXIS_REF | SlaveIn | Slave | AXIS_REF | |||
| BOOL | Execute | StartSync | BOOL | |||
| BOOL | Permanent | InSync | BOOL | |||
| INT | RatioNumerator | Busy | BOOL | |||
| UINT | RatioDenominator | Active | BOOL | |||
| MC_Source | MasterValueSource | CommandAborted | BOOL | |||
| LREAL | MasterSyncPosition | Error | BOOL | |||
| LREAL | SlaveSyncPosition | ErrorID | MC_Error | |||
| MC_SyncMode | SyncMode | |||||
| LREAL | MasterStartDistance | |||||
| LREAL | Velocity | |||||
| LREAL | Acceleration | |||||
| LREAL | Deceleration | |||||
| LREAL | Jerk | |||||
| MC_BufferMode | BufferMode | |||||
MC_GearInPos 之時序圖