| 功能塊 | MC_MoveDirectRelative | ||
|---|---|---|---|
| 命令軸組移動到相對位置,無需了解軸組是如何(從哪個路徑)到達該目標位置。開始位置為工具中心點 (TCP) 的實際位置。 | |||
| VAR_IN_OUT | |||
| B | GroupIn | AXES_GROUP_REF | 軸組的參考,參考以零為起點,最多可有 32 個軸組。 |
| VAR_INPUT | |||
| B | Execute | BOOL | 在上升邊緣開始運動。 |
| V | ContinuousUpdate | BOOL | 若為 TRUE,則當功能塊 (FB) 正在執行且參數值正被更新時,FB 將使用新值;若為 FALSE,則 FB 不會使用新值。 |
| B | Distance | ARRAY [0..63] OF LREAL | 指定坐標系統中每個維度的相對距離陣列 [0..63]。 |
| V | VelocityRatio | LREAL | 此比率用來調整軸組中每個軸的最大速度。值的範圍介於 0.0 - 1.0,即 0% - 100%。例如,若某軸組中的軸 A 與軸 B 的最大速度分別為 1000 與 800,而您輸入 0.8,則軸 A 與軸 B 的最大速度將分別變為 800 與 640。 |
| V | AccelerationRatio | LREAL | 此比率用來調整軸組中每個軸的最大加速度。值的範圍介於 0.0 - 1.0,即 0% - 100%。例如,若某軸組中的軸 A 與軸 B 的最大加速度分別為 1000 與 800,而您輸入 0.8,則軸 A 與軸 B 的最大加速度將分別變為 800 與 640。 |
| V | DecelerationRatio | LREAL | 此比率用來調整軸組中每個軸的最大減速度。值的範圍介於 0.0 - 1.0,即 0% - 100%。例如,若某軸組中的軸 A 與軸 B 的最大減速度分別為 1000 與 800,而您輸入 0.8,則軸 A 與軸 B 的最大減速度將分別變為 800 與 640。 |
| V | JerkRatio | LREAL | 此比率用來調整軸組中每個軸的最大加加速度。值的範圍介於 0.0 - 1.0,即 0% - 100%。例如,若某軸組中的軸 A 與軸 B 的最大加加速度分別為 1000 與 800,而您輸入 0.8,則軸 A 與軸 B 的最大加加速度將分別變為 800 與 640。 |
| E | CoordSystem | MC_CoordSystem | 坐標系統。 |
| E | BufferMode | MC_BufferMode | 定義函式的時間順序。 |
| E | TransitionMode | MC_TransitionMode | 目前不會插入轉換曲線。 |
| E | TransitionParameter | ARRAY [0..63] OF LREAL | 轉換模式的附加參數,若將 TransitionMode 設為 mcNone,則此參數無效。 |
| VAR_OUTPUT | |||
| B | Done | BOOL | 所有軸已達到命令之終點位置。 |
| E | Busy | BOOL | 功能塊未結束。 |
| E | Active | BOOL | 功能塊控制軸組。 |
| E | CommandAborted | BOOL | 命令被另一個命令中止。 |
| B | Error | BOOL | 功能塊中出現錯誤的訊號。 |
| E | ErrorID | MC_Error | 錯誤識別。 |
|
|||
| MC_MoveDirectRelative | ||||||
|---|---|---|---|---|---|---|
| AXES_GROUP_REF | GroupIn | Group | AXES_GROUP_REF | |||
| BOOL | Execute | Done | BOOL | |||
| BOOL | ContinuousUpdate | Busy | BOOL | |||
| ARRAY [0..63] OF LREAL | Distance | Active | BOOL | |||
| LREAL | VelocityRatio | CommandAborted | BOOL | |||
| LREAL | AccelerationRatio | Error | BOOL | |||
| LREAL | DecelerationRatio | ErrorID | MC_Error | |||
| LREAL | JerkRatio | |||||
| MC_CoordSystem | CoordSystem | |||||
| MC_BufferMode | BufferMode | |||||
| MC_TransitionMode | TransitionMode | |||||
| ARRAY [0..63] OF LREAL | TransitionParameter | |||||
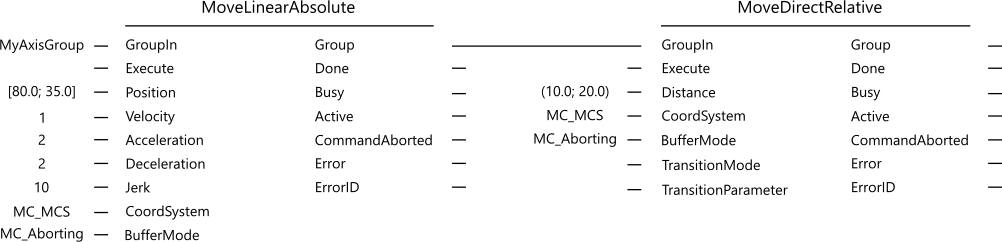
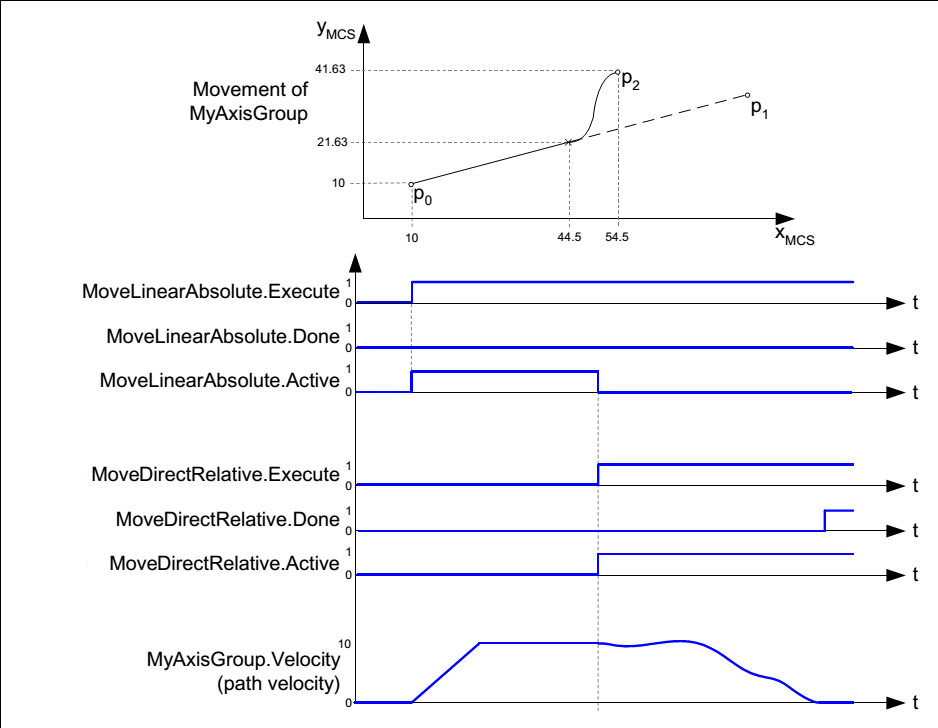
以下範例說明 MC_MoveDirectRelative 行為,所有位置都與 MCS 相關:
- 從 p0 (10; 10) 位置起始,對位置 p1 (80; 35) 下達 MC_MoveLinearAbsolute 指令。
- 在 TCP 朝 p1 移動時,MC_MoveLinearAbsolute 指令被 MC_MoveDirectRelative 指令中止。當 MC_MoveDirectRelative 指令啟用時,TCP 的實際位置為 (44.5; 21.63)。
- TCP 捨棄路線 p0p1 並朝新位置 p2 (54.5; 41.63) 移動,生成的軌跡取決於軸組的運動學轉換。