| Function block | MC_Halt | ||
|---|---|---|---|
| Commands a controlled motion stop. The axis is in the Discrete Motion state until the velocity is zero. With the Done output TRUE, the state is set to Standstill. | |||
| VAR_IN_OUT | |||
| B | AxisIn | AXIS_REF | Reference to an axis. |
| VAR_INPUT | |||
| B | Execute | BOOL | Starts the action at rising edge. |
| E | Deceleration | LREAL | Value of the deceleration. The unit is determined by MC_ProfileType. [unit/second2] or [second] |
| E | Jerk | LREAL | Value of the jerk. The unit is determined by MC_ProfileType. [unit/second3] or [second] |
| E | BufferMode | MC_BufferMode | Defines how to blend the velocity of two function blocks. |
| VAR_OUTPUT | |||
| B | Done | BOOL | Zero velocity reached. |
| E | Busy | BOOL | The function block is not finished and new output values are to be expected. |
| E | Active | BOOL | The function block is controlling the axis. |
| E | CommandAborted | BOOL | The command is aborted by another command. |
| B | Error | BOOL | Signals that an error has occurred within the function block. |
| E | ErrorID | MC_Error | Error identification. |
|
|||
| MC_Halt | ||||||
|---|---|---|---|---|---|---|
| AXIS_REF | AxisIn | Axis | AXIS_REF | |||
| BOOL | Execute | Done | BOOL | |||
| LREAL | Deceleration | Busy | BOOL | |||
| LREAL | Jerk | Active | BOOL | |||
| MC_BufferMode | BufferMode | CommandAborted | BOOL | |||
| Error | BOOL | |||||
| ErrorID | MC_Error | |||||
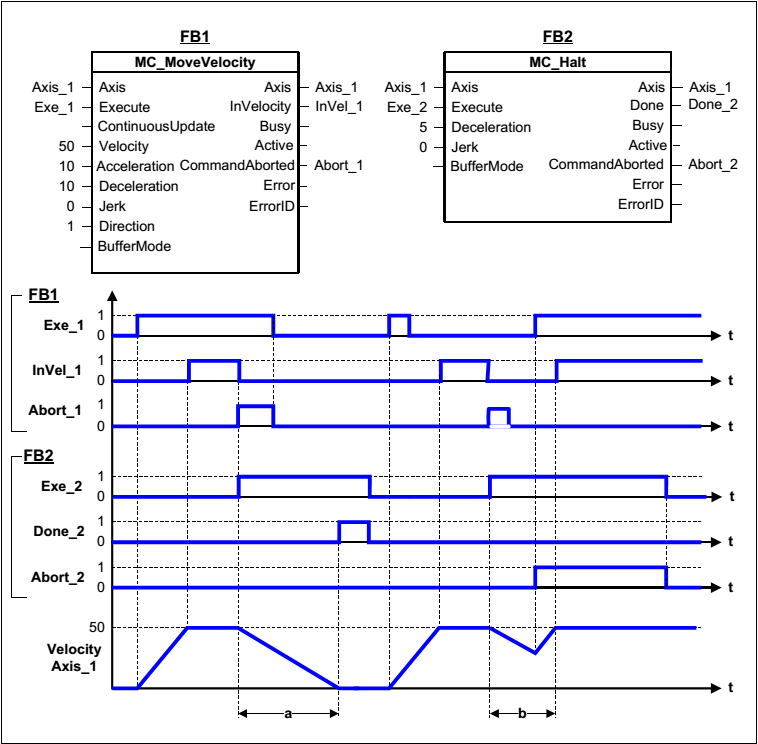
The example below shows the behavior in combination with a MC_MoveVelocity.
- A running axis is ramped down using MC_Halt.
- Another motion command overrides the MC_Halt command. MC_Halt allows this, in contrast to MC_Stop. The axis can accelerate again without reaching Standstill.