除了伺服驱动器的 PID 控制外,亦可使用 KINGSTAR PID 控制台来调整 PID 参数,在开始调整前需先测试您的伺服驱动器,若测试结果正常,则接著使用 KINGSTAR PID 调校以优化轴控制,一个好的伺服驱动器将有助于最佳化 KINGSTAR 的效能。
在调整之前需设置 PID 回馈延迟周期数,通常为 3 个周期,但若驱动器没有正确遵循同步,该值可能会有所不同。
测试回应
此功能用于测试伺服驱动器之 PID 控制以检视伺服驱动器在不同控制模式下的运作方式,若驱动器在所选控制模式下运行良好,则该模式可能是轴控制的好选择,反之可能需要考虑使用驱动器的工具来调校伺服驱动器,或使用其他控制模式,而驱动器必需通过测试以确保轴控制的品质,若伺服驱动器的测试结果不如预期的好,该驱动器将无法与 KINGSTAR PID 调校良好运作。
设定中的配置不会影响测试结果,其可用来将自订的设定套用到装置;而调校中的测试回应可用来测试伺服驱动器的 PID 控制。
- 点击「调校」页签。
- 在最上方的「模式」清单选择欲使用的控制模式。
- 于「装置」清单选择欲测试的装置。
- 点击「启用」以启用轴,该按键位于「装置」清单右边。
- 在「测试回应」下方的「移动」输入框中输入建议值。
- 在「PID 回馈延迟」输入框中输入 3。
- 点击「开始」以测试装置并检视图表,若结果不如预期,可调整「移动」的值。
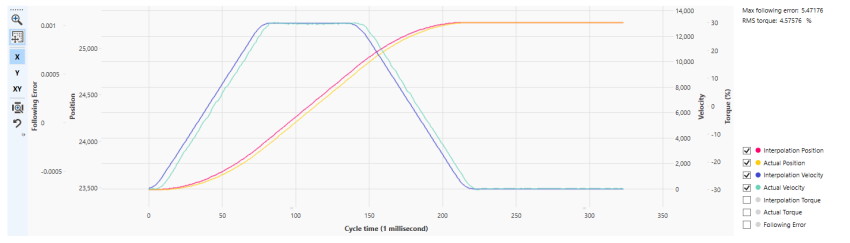
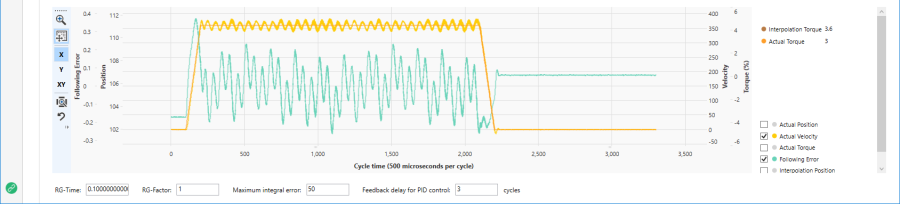
- 位置模式:使用最大追踪误差(勾选图表右侧的「追踪误差」)以检查位置好坏,追踪误差越小表示结果越好。
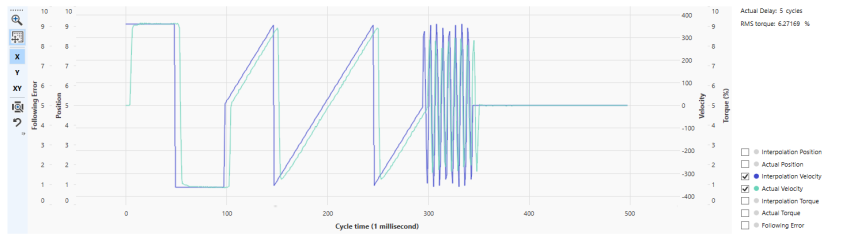
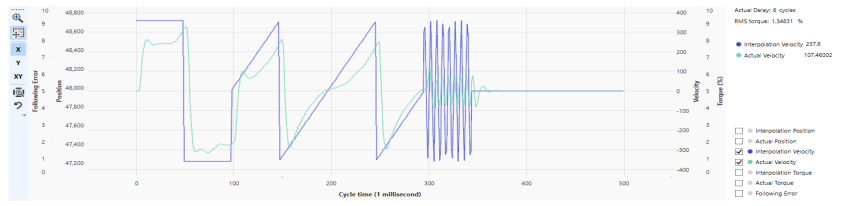
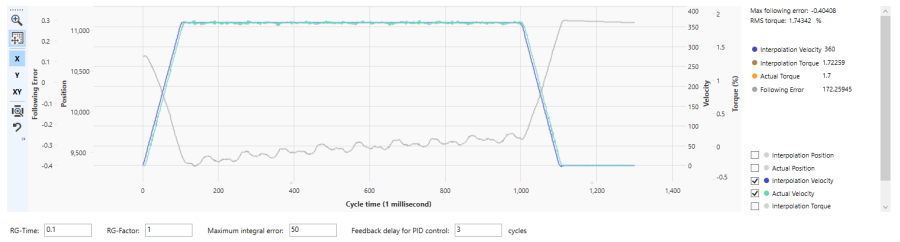
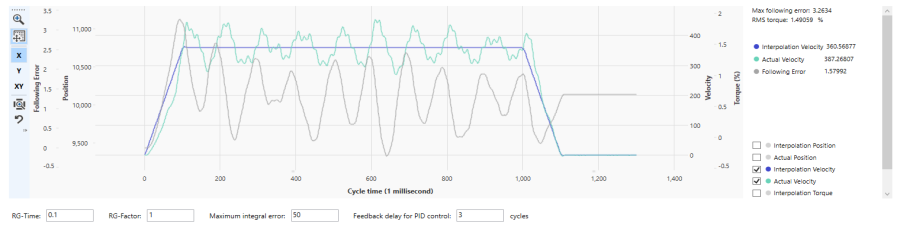
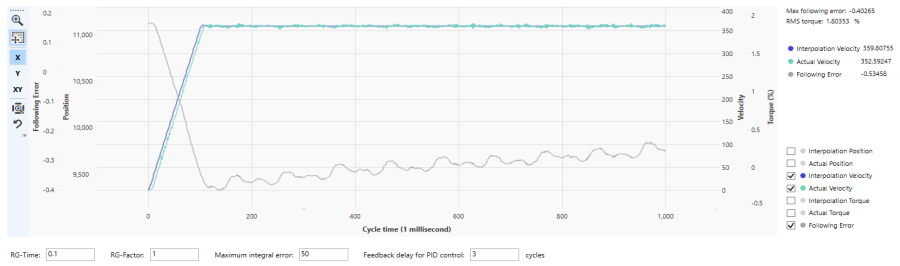
- 速度模式:实际速度与插补速度越吻合,表示结果越好。
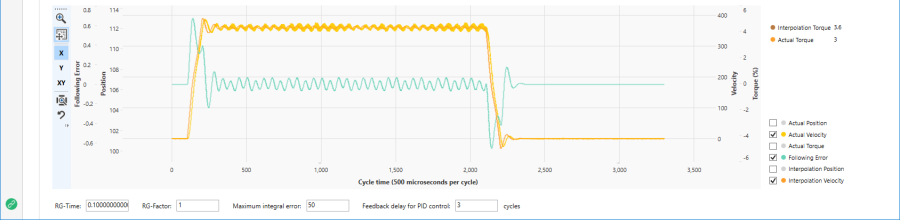
- 扭矩模式:实际扭矩与插补扭矩越吻合,表示结果越好。
| 位置模式 |
|
| 速度模式 – 佳 |
|
| 速度模式 – 不佳 |
|
自动调校
自动调校能协助您找到适用的 PID 值,您仍需手动调整 PID 以最佳化 PID 参数,但自动调校可让您快速取得适用的 PID,或在不知道如何调校 PID 时提供指引。
使用自动调校
- 在「专案设定」中点击「连线设定」并于「EtherCAT 设定」查看目前使用的「周期时间」,在「速度」模式下,周期时间建议使用 1 豪秒或更少;「扭矩」模式则建议使用 500 微秒或更少,欲使用比上述更慢的周期时间,在执行自动调校前请确保您的机器具备安全保护机制,以防测试出错。
- 点击「调校」页签。
- 在最上方的「模式」清单中选择「速度」或「扭矩」,自动调校仅支援这两个模式。
- 于「装置」清单选择欲测试的装置,若选择「扭矩」模式则您的装置必须支援扭矩。
- 点击「启用」以启用轴,该按键位于「装置」清单右边。
- 在「自动调校」下方各输入框中输入想要的值,注意在「条件」底下,在「速度」与「扭矩」模式间的项目会有所不同。更多关于不同处的资讯请见 调校 中「自动调校」的相关说明。
- 点击「开始」,稍等片刻直到调校完成。
| 速度模式 |
|
| 扭矩模式 |
|
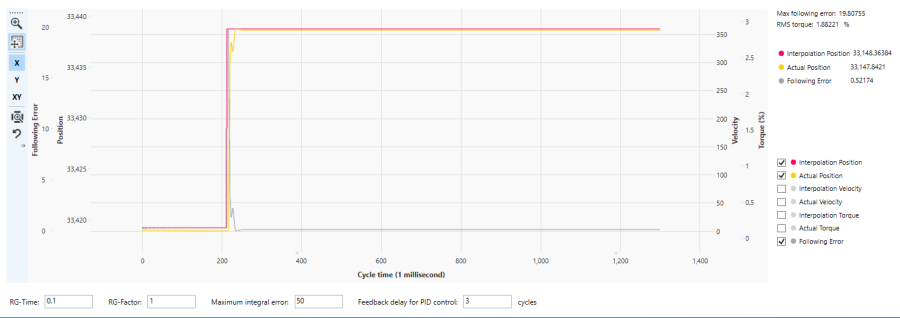
步进
您可使用步进来命令一小段运动以检查该运动的回应是否够快,实际位置应快速地跟进插补位置,而追踪误差应尽可能越小越好,在执行其他测试前必需先为步进调整 PID 参数。
欲调整步进,首先将「降低增益倍数」设定为 1,接著调整 KP 和 KD,若回应太小或太慢,则增加 KP;若回应太过强烈,则减少 KD,来回增加 KP 后增加 KD 直到取得一快速但不会过冲的曲线。
设定完 KP 和 KD 后,需接著调整 KV,速度模式的 KV 恒为 1;而扭矩模式的 KV 值会依照轴的回馈而定,最好将值由约 0.01 开始然后小幅增加值。
注意:调整完 步进 与 曲线 后可再次调整「降低增益倍数」。
| 步进 – 佳 |
|
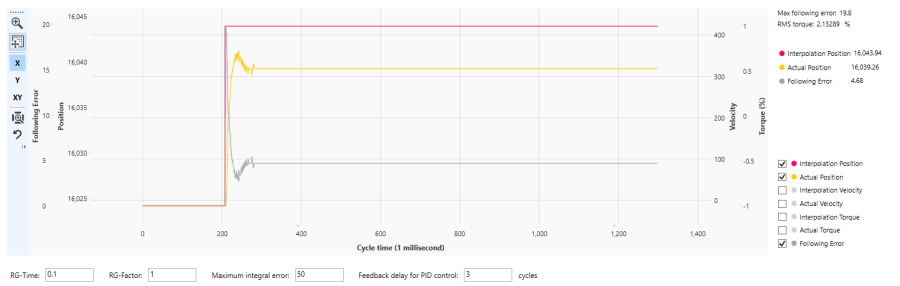
| 步进 – 不佳 |
|
曲线
曲线可用来检查追踪误差,追踪误差应越接近零越好,表示为好的结果,可使用 T 曲线或 S 曲线,建议您使用 S 曲线。
欲调整曲线,先调整 KV 然后调整 KAA 和 KAD,KI 为进阶使用,若不必要增加 KI 可维持原 KI 值。
| S 曲线 – 佳 |
|
| S 曲线 – 不佳 |
|
固定速度
检查马达在固定速度下是否正常运作,追踪误差应越接近零越好,表示为好的结果。
参见