| 功能塊 | MC_Stop | ||
|---|---|---|---|
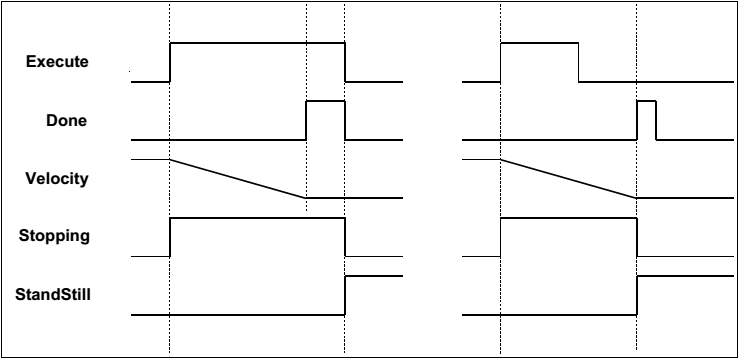
| 命令控制的運動站和將軸設定至停止 (Stopping) 狀態。其中斷所有正在執行中的功能塊,當軸在停止 (Stopping) 狀態時,其他功能塊將無法移動軸,當軸到達速度零時,Done 輸出將立即設為 TRUE。只要 Execute 為 TRUE 或尚未達到速度零,軸就會保持在 Stopping 狀態,而一旦設置了 Done 且 Execute 為 FALSE,軸就會進入 Standstill 狀態。 | |||
| VAR_IN_OUT | |||
| B | AxisIn | AXIS_REF | 軸的參考。 |
| VAR_INPUT | |||
| B | Execute | BOOL | 在上升邊緣開始運動。 |
| E | Deceleration | LREAL | 減速度值,單位由 MC_ProfileType 決定為 [單位/每秒2] 或 [每秒]。 |
| E | Jerk | LREAL | 加加速度值。單位由 MC_ProfileType 決定為 [單位/每秒3] 或 [每秒]。 |
| VAR_OUTPUT | |||
| B | Done | BOOL | 到達速度零。 |
| E | Busy | BOOL | 功能塊尚未完成且預期將有新的輸出值。 |
| E | CommandAborted | BOOL | 關閉電源將中止命令(只有 MC_Power 可將其中止)。 |
| B | Error | BOOL | 功能塊中出現錯誤的訊號。 |
| E | ErrorID | MC_Error | 錯誤識別。 |
|
|||
| MC_Stop | ||||||
|---|---|---|---|---|---|---|
| AXIS_REF | AxisIn | Axis | AXIS_REF | |||
| BOOL | Execute | Done | BOOL | |||
| LREAL | Deceleration | Busy | BOOL | |||
| LREAL | Jerk | CommandAborted | BOOL | |||
| Error | BOOL | |||||
| ErrorID | MC_Error | |||||
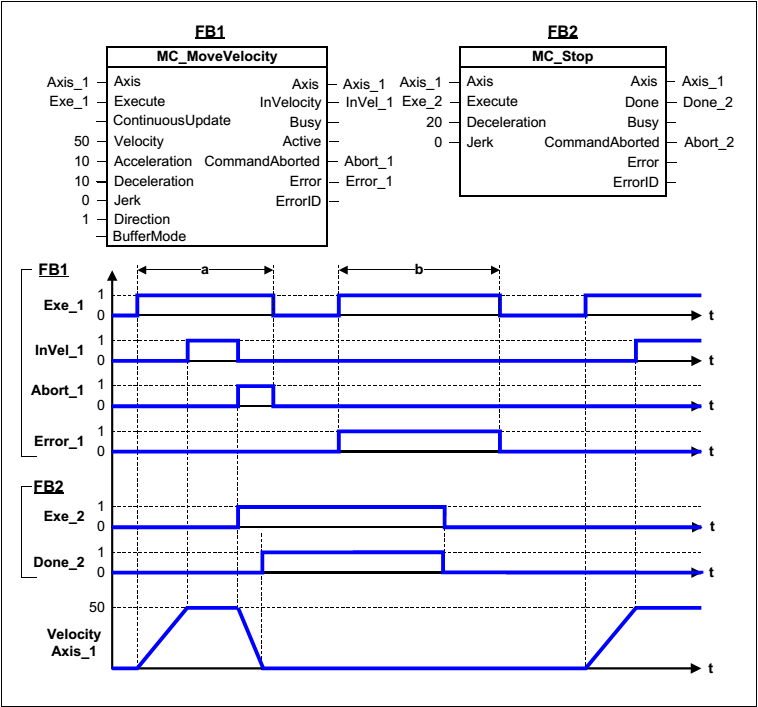
以下範例說明使用 MC_MoveVelocity 組合的行為。
- 使用功能塊 (FB) MC_Stop 使旋轉軸下降。
- 只要 MC_Stop 的參數 Execute = TRUE,軸就會拒絕運動命令。MC_MoveVelocity FB 回報錯誤,表示 MC_Stop 命令忙碌。