| 功能塊 | MC_MoveHelicalAbsolute | ||
|---|---|---|---|
| 命令軸組之工具中心點自當前位置進行插補螺旋運動。終點和輔助點在指定的坐標系統中為絕對定義(終點和輔助點的定義取決於所選的 CircMode 模式)。 | |||
| VAR_IN_OUT | |||
| V | GroupIn | AXES_GROUP_REF | 軸組的參考,參考以零為起點,最多可有 32 個軸組。 |
| VAR_INPUT | |||
| V | Execute | BOOL | 在上升邊緣開始運動。 |
| V | ContinuousUpdate | BOOL |
若為 TRUE,則當功能塊 (FB) 正在執行且參數值正被更新時,FB 將使用新值;若為 FALSE,則 FB 不會使用新值。 注意:不支援此參數。 |
| V | CircMode | MC_CircMode | 指定輸入訊號 AuxPoint 的定義。 |
| V | AuxPoint | ARRAY [0..63] OF LREAL | 指定坐標系中每個維度的絕對位置陣列 [0..63], |
| V | EndPoint | ARRAY [0..63] OF LREAL | 指定坐標系中每個維度的絕對位置陣列 [0..63],這些位置是相對於起點的位置所定義的。 |
| V | PathChoice | MC_CircPathChoice | 路徑的選擇。 |
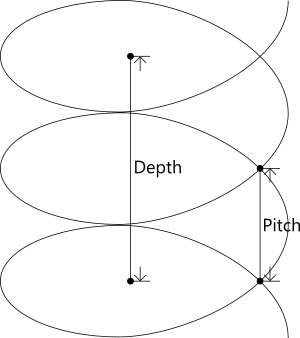
| V | Depth | LREAL | 螺旋線高度。 |
| V | Pitch | LREAL | 一個完整螺旋圈的高度。 |
| V | Velocity | LREAL | 定義路徑中坐標系路徑的最大速度。永遠為正值,非必要到達,[單位/每秒]。 |
| V | Acceleration | LREAL | 最大加速度。永遠為正值,非必要到達,單位由 MC_ProfileType 決定,為 [單位/每秒2] 或 [每秒]。 |
| V | Deceleration | LREAL | 最大加速度。永遠為正值,非必要到達,單位由 MC_ProfileType 決定,為 [單位/每秒2] 或 [每秒]。 |
| V | Jerk | LREAL | 最大加加速度,永遠為正值,非必要到達,單位由 MC_ProfileType 決定,為 [單位/每秒3] 或 [每秒]。 |
| V | CoordSystem | MC_CoordSystem | 坐標系統。 |
| V | BufferMode | MC_BufferMode | 定義如何融合兩功能塊的速度。 |
| V | TransitionMode | MC_TransitionMode | 當前未插入轉換曲線。 |
| V | TransitionParameter | ARRAY [0..63] OF LREAL | 轉換模式的附加參數,若將 TransitionMode 設為 mcNone,則此參數無效。 |
| VAR_OUTPUT | |||
| V | Done | BOOL | 所有軸已達到命令之終點位置。 |
| V | Busy | BOOL | 功能塊未結束。 |
| V | Active | BOOL | 功能塊控制軸組。 |
| V | CommandAborted | BOOL | 命令被另一個命令中止。 |
| V | Error | BOOL | 功能塊中出現錯誤的訊號。 |
| V | ErrorID | MC_Error | 錯誤識別。 |
|
|||
| MC_MoveHelicalAbsolute | ||||||
|---|---|---|---|---|---|---|
| AXES_GROUP_REF | GroupIn | Group | AXES_GROUP_REF | |||
| BOOL | Execute | Done | BOOL | |||
| BOOL | ContinuousUpdate | Busy | BOOL | |||
| MC_CircMode | CircMode | Active | BOOL | |||
| ARRAY [0..63] OF LREAL | AuxPoint | CommandAborted | BOOL | |||
| ARRAY [0..63] OF LREAL | EndPoint | Error | BOOL | |||
| MC_CircPathChoice | PathChoice | ErrorID | MC_Error | |||
| Depth | LREAL | |||||
| Pitch | LREAL | |||||
| LREAL | Velocity | |||||
| LREAL | Acceleration | |||||
| LREAL | Deceleration | |||||
| LREAL | Jerk | |||||
| MC_CoordSystem | CoordSystem | |||||
| MC_BufferMode | BufferMode | |||||
| MC_TransitionMode | TransitionMode | |||||
| ARRAY [0..63] OF LREAL | TransitionParameter |
|
|
|||
| LREAL | Velocity |
|
|
|||
|
|
|
|
|
|||
Depth 與 Pitch 參數如下圖所示:
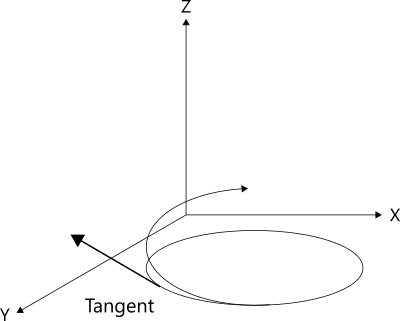
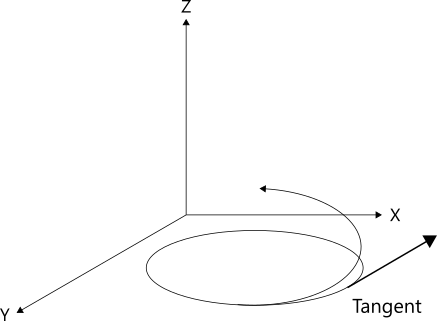
插補的速度是切線速度。
| 順時針路徑 | 逆時針路徑 |
|---|---|
|
|