SetAxisCyclicSwitch
Uses an axis' position to control a switch that triggers a digital output repeatedly. When an axis reaches a certain position, a switch is turned on or off. A switch can be controlled by a forward and backward movement of an axis.
Syntax
KsCommandStatus SetAxisCyclicSwitch(
int Index,
McOutput Output,
double StartPosition,
McCamSwitch CyclicSwitch,
McLengthType IntervalType,
double Interval,
McLengthType DurationType,
double Duration,
McSource ValueSource
);Parameters
Index [in]: the index of an axis. Indexes are zero based. Aliases affect this parameter.
Output [in]: selects which digital output will be controlled by the corresponding track. See the McOutput structure.
StartPosition [in]: the position from which the cycle starts.
CyclicSwitch [in]: controls the switching actions. See the McCamSwitch structure.
- TrackNumber: must be zero.
- FirstOnPosition: must be nonnegative. It is the distance relative to each cycle’s starting position.
- LastOnPosition: must be positive and greater than FirstOnPosition. It is the distance relative to each cycle’s starting position.
- Duration: must be positive.
IntervalType [in]: the type of Interval. mcDistance and mcTime can be used. See the McLengthType type.
Interval [in]: the length of a cycle. It depends on the IntervalType you select. This value must be positive.
DurationType [in]: the type of Duration. mcDistance and mcCount can be used. See the McLengthType type.
Duration [in]: the duration over which the cycle repeats. It depends on the DurationType you select. This value must be positive.
ValueSource [in]: defines the source for axis values. For example, positions. See the McSource type.
- mcCommandedValue, mcSetValue – synchronization on set value. We suggest you use these settings.
- mcActualValue – synchronization on actual value. This setting may not be stable.
- mcSecondEncoderValue – the actual value read from the second encoder.
Return value
Returns the KsCommandStatus structure.
Remarks
- McCamSwitch is a vendor-specific structure that defines switches for digital cam.
- McOutput is a vendor-specific structure linked to the (physical) outputs. If you are using your servo drive's digital output (DO), you need to use EnableAxisOutput before Start.
- In the McCamSwitch structure, when CamSwitchMode is Position, the following combinations are not supported:
- IntervalType: mcTime, DurationType: mcDistance.
- IntervalType: mcTime, DurationType: mcCount.
Example
Case 1
A cyclic switch completes its task for the duration.
McOutput outputBit = {
FALSE, //Axis or IO module. FALSE = I/O.
0, //Index
0 //Offset
}
McCamSwitch cyclicSwitch = {
0, //TrackNumber
40, //FirstOnPosition
60, //LastOnPosition
1, //AxisDirection. 1 = Positive.
0, //CamSwitchMode. 0 = Position.
0 //Duration. It is not used in this case.
);
Command = SetAxisCyclicSwitch(
TargetAxis, //Index
outputBit, //Output
100, //StartPosition
cyclicSwitch, //CyclicSwitch
mcDistance, //IntervalType
100, //Interval
mcDistance, //DurationType
250, //Duration
mcSetValue //ValueSource
);

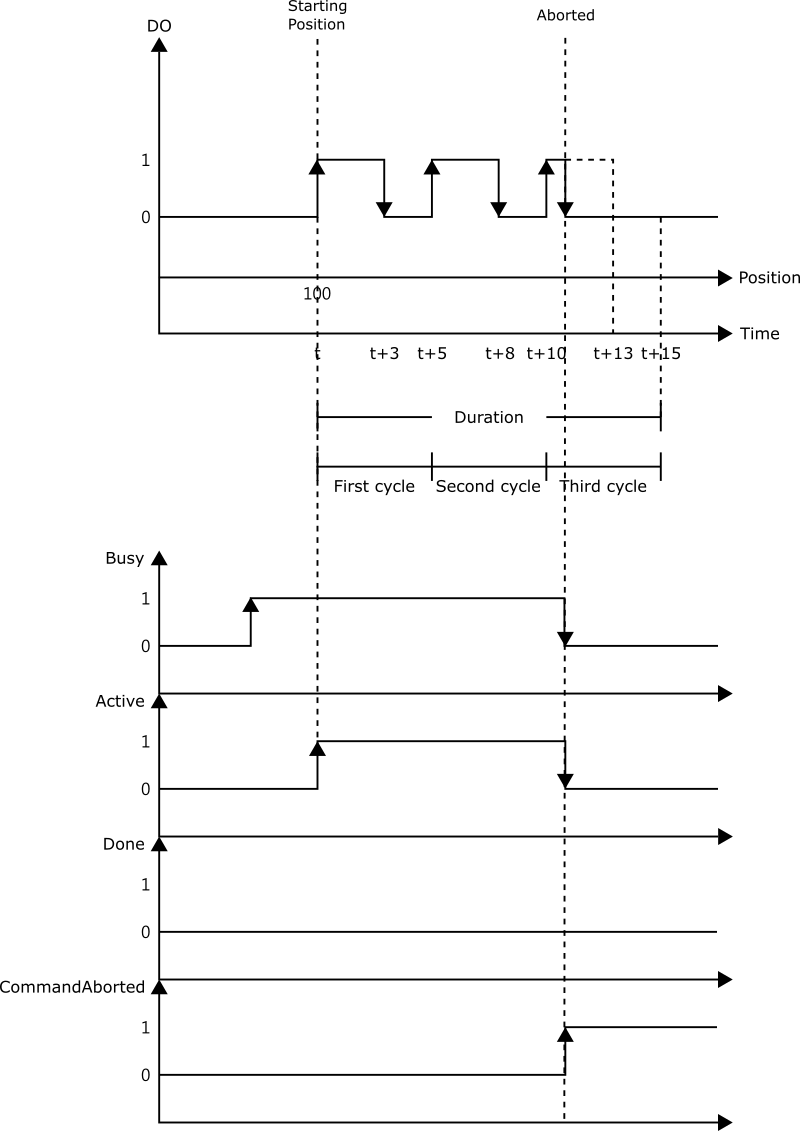
Case 2
A cyclic switch is aborted before it completes the task.
McOutput outputBit = {
FALSE, //Axis or IO module. FALSE = I/O.
0, //Index
0 //Offset
}
McCamSwitch cyclicSwitch = {
0, //TrackNumber
0, //FirstOnPosition
0, //LastOnPosition
1, //AxisDirection. 1 = Positive.
1, //CamSwitchMode. 1 = Time.
0.003 //Duration
);
Command = SetAxisCyclicSwitch(
TargetAxis, //Index
outputBit, //Output
100, //StartPosition
cyclicSwitch, //CyclicSwitch
mcTime, //IntervalType
0.005, //Interval
mcCount, //DurationType
3, //Duration
mcSetValue //ValueSource
);
Requirements
| RT | Win32 | |
|---|---|---|
| Minimum supported version | 4.1 | 4.1 |
| Header | ksmotion.h | ksmotion.h |
| Library | KsApi_Rtss.lib | KsApi.lib |
See also