此测试页面包含一些基本运动功能,可用来测试轴是否正确移动。
于专案设定窗格点选一个轴,然后点选设定窗格中的「测试」页签以开启此页。欲开始测试所选的轴,点击右上方的「启用」按键;您亦可从「装置」下拉选单选择一个轴并启用它。

主题:
传送与读取
位于设定、测试及调校页面的「传送」与「读取」按键是连动的,意旨若在任一页面改变了与轴相关的某些设定,相关的改变将在其他页面被标注。更多关于按键的资讯请见 设定 > 传送与读取。
在测试页面中,与「传送」和「读取」相关的设定为原点回归。
传送:将新值套用到 KINGSTAR 子系统,点击「传送」以后,设定工具将提醒您设定将改变。
读取:读取 KINGSTAR 子系统的值,点击「读取」以后,设定工具将提醒您所读取的值将会覆写栏位中的值。
输入
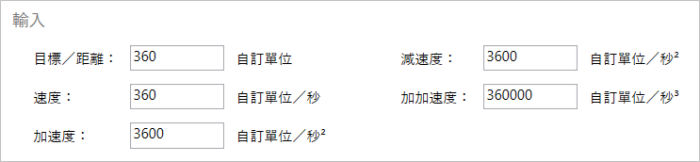
目标 / 距离:运动的目标位置或相对距离。
速度:速度。
加速度:加速度。
减速度:减速度。
加加速度:加加速度。
设定工具中所有的运动参数皆受单位转换(测试设定区域)与加速度单位 (设定 > 运动) 影响。更多关于加速度单位的运作方式请见:概念解说 > 运动曲线类型。
| 单位/秒 | 延迟(秒) | |
|---|---|---|
| 单位转换 (开) |
目标/距离:使用者单位 速度:使用者单位/秒 加速度:使用者单位/秒2 减速度:使用者单位/秒2 加加速度:使用者单位/秒3 加加加速度:使用者单位/秒4 |
目标/距离:使用者单位 速度:使用者单位/秒 加速度:秒 减速度:秒 加加速度:秒 加加加速度:秒 |
| 单位转换 (关) |
目标/距离:计数 速度:计数/秒 加速度:计数/秒2 减速度:计数/秒2 加加速度:计数/秒3 加加加速度:计数/秒4 |
目标/距离:计数 速度:计数/秒 加速度:秒 减速度:秒 加加速度:秒 加加加速度:秒 |
原点回归
设定轴的原点回归模式。点击 ![]() 以展开原点回归选项。
以展开原点回归选项。

设定
反转 开/关:反转感测器值,未勾选表示当感测器在高位(开)则被视为有触动;勾选表示当感测器在低位(关)视为有触动。
数位输入:
编辑:从模组清单中选择数位输入。
删除:移除所选的数位输入。
驱动器回归方法:使用伺服驱动器的原点回归功能。更多关于伺服驱动器的原点回归方法,请参照其使用说明书。
驱动器回归偏移量:轴找到原点感测器后移动的距离。
参数
回归模式:原点回归模式,选项包含 探针式 (Homing Latch)、接触式 (Homing Soft)、讯号式 (Homing Sensor)、驱动器 (Homing Slave)、 就地 (Homing On Position) 与 驱动器手动 (Manual Homing Slave) 模式。
方向:原点回归方向,选项包含 正、负。
末速度:原点回归移动的末速度,使用方式依原点回归模式而定。
动作
用来测试轴的基本动作。

向后寸动与向前寸动
可在不指定目标位置下测试速度,可选择向后或向前寸动,此运动对应至 IAxis.Jog。
欲执行寸动运动,按住向后寸动或向前寸动图标以开始寸动,放开滑鼠即可停止。
原点
命令轴执行"寻找原点"序列,此功能对应至 IAxis.Home。
欲执行原点运动,直接点击该图标。
绝对位置
绝对位置按键可用来命令一个控制运动到达指定的绝对位置,其对应至 IAxis.MoveAbsolute。
欲执行绝对位置,直接点击该图标。
注意:启用模数轴时,绝对位置 指令将采用最短路径到达目标位置。
向后与向前
向后与向前按键可用来下达一个相对运动命令,以将一个特定距离加入目前指令位置。此运动对应至 IAxis.MoveRelative。
欲执行向后与向前运动,直接点击该图标。
来回运动
此运动与 相对位置 相似,对应至 IAxis.MoveRelative,不同之处在于轴将来回移动,距离由输入中的目标 / 距离决定。
欲执行 来回运动,直接点击该图标,再次点击可停止来回运动。
停止动作
停止动作。
轴状态与值
轴移动的结果将显示于此。
轴
|
实际位置:实际位置。启用模数轴时,此值将被转换为模数值,并于下方显示模数刻度指示器。 实际速度:实际速度。 实际扭矩:实际扭矩。 追踪误差:追踪误差。 控制模式:控制模式,欲检视控制模式的完整名称,将滑鼠游标移至显示的模式名称上方。更多资讯请见 McControlMode。 状态:轴状态。更多资讯请见 AxisState。 |

|
LED
|
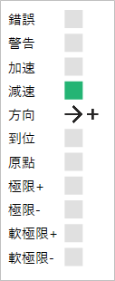
颜色与讯号:
错误:轴错误。 错误代码:
警告:轴警告。 加速:加速度。 减速:减速度。 方向:方向。若轴在下列状态则此图标不会显示:离线、CommunicationError、MotionError、停用、StandStill。
到位:到达位置。 原点:原点回归开关。 极限+:正极限开关。 极限-:负极限开关。 软极限+:正软体极限开关。 软极限-:负软体极限开关。 |
|
 :正。
:正。 :负。
:负。参见