命令軸組之工具中心點自當前位置進行插補螺旋運動。終點和輔助點在相對於起始點的指定的坐標系統中定義(終點和輔助點的定義取決於所選的 CircMode 模式),指定的相對距離在執行時將被添加到所設定的位置。
語法
KsCommandStatus MoveHelicalAdditive(
int Index,
McCircMode CircMode,
int Length,
double* AuxPoint,
double* EndPoint,
McCircPathChoice PathChoice,
double Depth,
double Pitch,
double Velocity,
double Acceleration,
double Deceleration,
double Jerk,
McCoordSystem CoordSystem,
McBufferMode BufferMode,
McTransitionMode TransitionMode,
double* TransitionParameter
);參數
Index [in]:軸組索引,索引以零為起點。最多可有 32 個軸組。
CircMode [in]:指定輸入信號 AuxPoint 的定義。請見 McCircMode 類型。
Length [in]: AuxPoint 與 EndPoint 陣列的長度。.
AuxPoint [in]:指定坐標系中每個維度的位置陣列 [1..N],其中 N 為 64。這些位置是相對於起點的位置所定義的。
EndPoint [in]:指定坐標系中每個維度的位置陣列 [1..N],其中 N 為 64。這些位置是相對於起點的位置所定義的。
PathChoice [in]:路徑的選擇。請見 McCircPathChoice 類型。
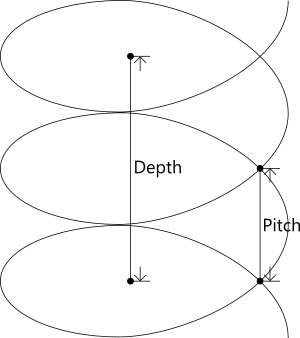
Depth [in]:螺旋線的高度。
Pitch [in]:完整螺旋圈的高度。
Velocity [in]:定義路徑中坐標系路徑的最大速度,永遠為正值,非必要到達,[單位/秒]。
Acceleration [in]:最大加速度,永遠為正值,非必要到達,單位由 McProfileType 類型決定,為 [單位/秒2] 或 [秒]。
Deceleration [in]:最大減速度,永遠為正值,非必要到達,單位由 McProfileType 類型決定,為 [單位/秒2] 或 [秒]。
Jerk [in]:最大加加速度。永遠為正值,非必要到達,單位由 McProfileType 類型決定,為 [單位/秒3] 或 [秒]。
CoordSystem [in]:座標系統,請見 McCoordSystem 類型。
BufferMode [in]:定義如何融合兩功能的速度,請見 McBufferMode 類型。
TransitionMode [in]:插入轉換曲線。請見 McTransitionMode 類型。
TransitionParameter [in]:轉換模式的附加參數,若將 TransitionMode 設為 mcNone,則此參數無效。
回傳值
返回 KsCommandStatus 結構。
備註
- 更多關於絕對、相對與附加的運作方式之資訊請見: 概念解說 > 運動。
- 更多關於軸在 McCircMode 模式中的移動方式之資訊請見: 概念解說 > McCircMode。
- Depth 與 Pitch 參數如下圖所示:
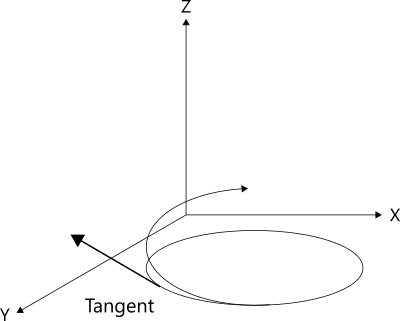
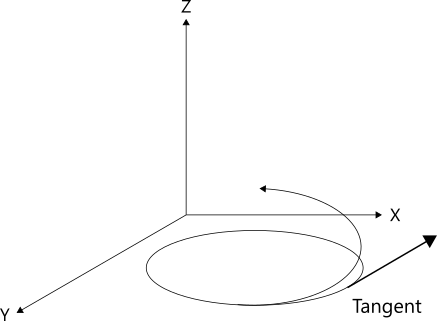
- 插補的速度是切線速度。
| 順時針路徑 | 逆時針路徑 |
|---|---|
|
|
範例
N/A使用需求
| RT | Win32 | |
|---|---|---|
| 最低支援版本 | 4.0 | 4.0 |
| 標頭檔 | ksmotion.h | ksmotion.h |
| 程式庫 | KsApi_Rtss.lib | KsApi.lib |
參見