Chapter 8: Gearing
Gearing is a synchronized motion that uses one axis' velocity to control another's. It links two axes: master and slave. After linking them you move the master axis. During the master's movement, the slave's velocity always follows the master's, until the gearing is aborted. The slave's position is not monitored or controlled while its velocity is being synchronized with the master's.
In other words, gearing is velocity synchronization. The easy way to learn how gearing works is to imagine the master and slave axes as two gears. One gear (master) drives another (slave). Every master can be the slave of another axis. You can create a gear train by attaching axes one by one.
In this chapter, you'll learn how to make a gear move.
Gear ratio
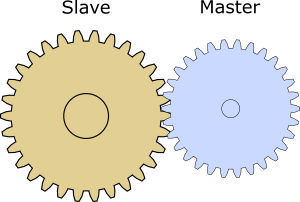
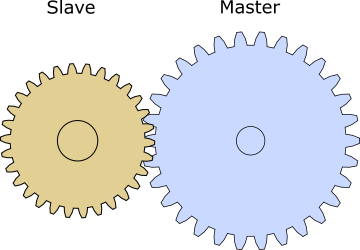
When you use SetAxisGear and SetAxisGearInPos to link the master and slave, you need to set a gear ratio using the parameter Ratio. The figures below show different gear ratios.
- Ratio 3:2
- Ratio 3:5
Add a header and .cpp file
You need to add a header and a .cpp file to learn the code of this chapter. The steps of adding them are written in Chapter 2 > Add a header and .cpp file.
- Add a header file:
- Add a .cpp file:
In Solution Explorer, in Header Files, add a header file and name it "Gear.h."
In Solution Explorer, in Source Files, add a C++ file and name it "Gear.cpp."
Tutorials
Take the following steps to complete the training: